
5.12: Gravitational Potential of any Massive Body



- Last updated
- Nov 1, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
You might just want to look at Chapter 2 of Classical Mechanics (Moments of Inertia) before proceeding further with this chapter.
In figure VIII.26 I draw a massive body whose centre of mass is C, and an external point P at a distance R from C. I draw a set of Cxyz axes, such that P is on the z-axis, the coordinates of P being (0,0,z). I indicate an element δm of mass, distant r from C and l from P. I’ll suppose that the density at δm is ρ and the volume of the mass element is δτ, so that δm=ρδτ.
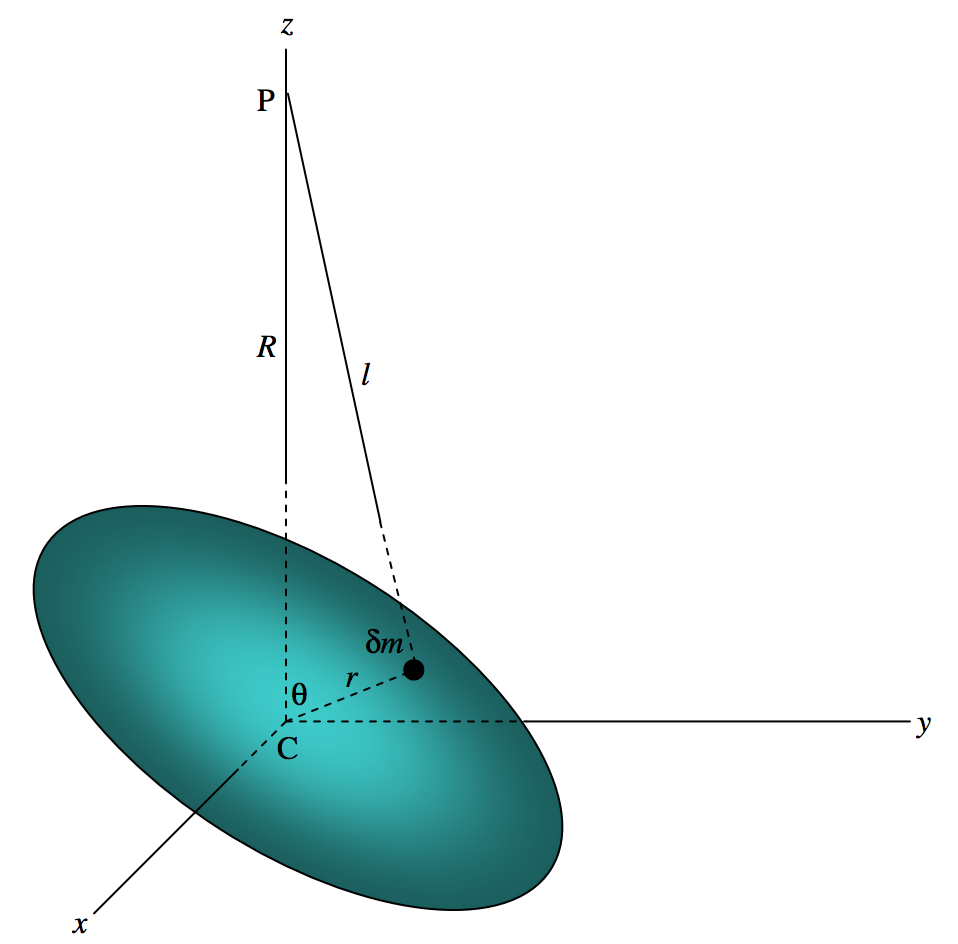
FIGURE V.26
The potential at P is
ψ=−G∫dml=−G∫ρdτl.
But l2=R2+r2−2Rrcos2θ,
so ψ=−G[1R∫ρdτ+1R2∫ρrcosθdτ+1R3∫ρr2P2(cosθ)dτ+1R4∫ρr3P3(cosθ)dτ...].
The integral is to be taken over the entire body, so that ∫ρdτ=M, where M is the mass of the body. Also ∫ρrcosθdτ=∫zdm, which is zero, since C is the centre of mass. The third term is
12R3∫ρr2(3cos2θ−1)dτ=12R3∫ρr2(2−3sin2θ)dτ.
Now
∫2ρr2dτ=∫2r2dm=∫[(y2+z2)+(z2+x2)+(x2+y2)]dm=A+B+C
where A, B and C are the second moments of inertia with respect to the axes Cx, Cy, Cz respectively. But A+B+C is invariant with respect to rotation of axes, so it is also equal to A0+B0+C0, where A0, B0, C0 are the principal moments of inertia.
Lastly, ∫ρr2sin2θdτ is equal to C, the moment of inertia with respect to the axis Cz.
Thus, if R is sufficiently larger than r so that we can neglect terms of order (r/R)3 and higher, we obtain
ψ=−GM(2MR2+A0+B0+C0−3C)2R3.
In the special case of an oblate symmetric top, in which A0=B0<C0, and the line CP makes an angle γ with the principal axis, we have
C=A0+(C0−A0)cos2γ=A0+(C0−A0)Z2/R2,
so that ψ=−GR[M+C0−A02R2(1−3Z2R2)].
Now consider a uniform oblate spheroid of polar and equatorial diameters 2c and 2a respectively. It is easy to show that
C0=25Ma2.
Confirm Equation 5.12.7.
It is slightly less easy to show (Exercise: Show it.) that
A0=15M(a2+c2).
For a symmetric top, the integrals of the odd polynomials of Equation 5.12.2 are zero, and the potential is generally written in the form
ψ=−GMR[1+(aR)2J2P2(cosγ)+(aR)J4P4(cosγ)...]
Here γ is the angle between CP and the principal axis. For a uniform oblate spheroid, J2=C0−A0Mc2. This result will be useful in a later chapter when we discuss precession.