
2.9: Angular Momentum of a Many-Body System




- Last updated
- Nov 21, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Center-of-mass Decomposition
As was the case for linear momentum, for a many-body system it is possible to separate the angular momentum into two components. One component is the angular momentum about the center of mass and the other component is the angular motion of the center of mass about the origin of the coordinate system. This separation is done by describing the angular momentum of a many-body system using a position vector r′i with respect to the center of mass plus the vector location R of the center of mass.
ri=R+r′i
The total angular momentum
L=n∑iLi=n∑iri×pi=n∑i(R+r′i)×mi(˙R+˙r′i)=n∑imi[r′i×˙r′i+r′i×˙R+R×˙r′i+R×˙R]
Note that if the position vectors are with respect to the center of mass, then ∑nimir′i=0 resulting in the middle two terms in the bracket being zero, that is;
L=n∑ir′i×p′i+R+P
The total angular momentum separates into two terms, the angular momentum about the center of mass, plus the angular momentum of the center of mass about the origin of the axis system. This factoring of the angular momentum only applies for the center of mass. This is called Samuel König’s first theorem.
Equations of motion
The time derivative of the angular momentum
˙Li=ddtri×pi=˙ri×pi+ri×˙pi
˙ri×pi=mi˙ri×˙ri=0
˙Li=ri×˙pi=ri×Fi=Ni
Consider that the resultant force acting on particle i in this n -particle system can be separated into an external force FExti plus internal forces between the n particles of the system
Fi=FEi+n∑ji≠jfij
The origin of the external force is from outside of the system while the internal force is due to the interaction with the other n−1 particles in the system. Newton’s Law tells us that
˙pi=Fi=FEi+n∑ji≠jfij
The rate of change of total angular momentum is
˙L=∑i˙Li=∑iri×˙pi=∑iri×FEi +∑i∑ji≠jri×fij
Since fij=−fji the last expression can be written as
∑i∑ji≠jri×fij=∑i∑ji<j(ri−rj)×fij
Note that (ri−rj) is the vector rij connecting j to i. For central forces the force vector fij=fij^rij thus
∑i∑ji<j(ri−rj)×fij=∑i∑ji<jri×fij^rij
That is, for central internal forces the total internal torque on a system of particles is zero, and the rate of change of total angular momentum for central internal forces becomes
˙L=∑iri×FEi=∑iNEi=NE
where NE is the net external torque acting on the system. Equation ??? leads to the differential and integral forms of the first integral relating the total angular momentum to total external torque.
˙L=NE∫21NEdt=L2−L1
Angular momentum conservation occurs in many problems involving zero external torques NE=0 plus two-body central forces F=f(r)ˆr since the torque on the particle about the center of the force is zero
N=r×F=f(r)[r׈r]=0
Examples are, the central gravitational force for stellar or planetary systems in astrophysics, and the central electrostatic force manifest for motion of electrons in the atom. In addition, the component of angular momentum about any axis L.ˆe is conserved if the net external torque about that axis N.ˆe=0.
Example 2.9.1: Bolas thrown by gaucho
Consider the bolas thrown by a gaucho to catch cattle. This is a system with conserved linear and angular momentum about certain axes. When the bolas leaves the gaucho’s hand the center of mass has a linear velocity V and an angular momentum about the center of mass of L. If no external torques act, then the center of mass of the bolas will follow a typical ballistic trajectory in the earth’s gravitational field while the angular momentum vector L is conserved, that is, both in magnitude and direction. The tension in the ropes connecting the three balls does not impact the motion of the system as long as the ropes do not snap due to centrifugal forces.
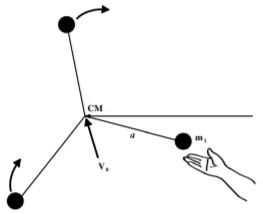
Figure 2.9.1: Bolas thrown by a guacho.

Figure 2.9.2: A hunter using bolas while mounted on a horse. (Public Domain; Pearson Scott Foresman)