
19.6: Angular Momentum of a System of Particles





( \newcommand{\kernel}{\mathrm{null}\,}\)
We now calculate the angular momentum about the point S associated with a system of N point particles. Label each individual particle by the index j,j=1,2,⋯,N. Let the jth particle have mass mj and velocity →V. The momentum of an individual particle is then →pj=mj→vj. Let →rS,j be the vector from the point S to the jth particle, and let θj be the angle between the vectors →rS,j and →pj (Figure 19.10).
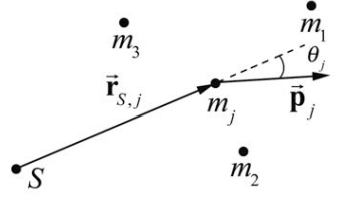
The angular momentum →LS,j of the jth particle is
→LS,j=→rS,j×→pj
The angular momentum for the system of particles is the vector sum of the individual angular momenta,
→LsysS=i=N∑j=1→LS,j=i=N∑j=1→rS,j×→pj
The change in the angular momentum of the system of particles about a point S is given by
d→LsysSdt=ddtj=N∑j=1→LS,j=j=N∑j=1(d→rS,jdt×→pj+→rS,j×d→pjdt)
Because the velocity of the jth particle is →vS,j=drS,j/dt, the first term in the parentheses vanishes (the cross product of a vector with itself is zero because they are parallel to each other)
d→rS,jdt×→pj=→vS,j×mj→vS,j=0
Substitute Equation (19.5.4) and →Fj=d→pj/dt into Equation (19.5.3) yielding
d→LsysSdt=i=N∑j=1(→rS,j×d→pjdt)=i=N∑j=1(→rS,j×→Fj)
Because
j=N∑j=1(→rS,j×→Fj)=j=N∑j=1→τS,j=→τextS+→τintS
We have already shown in Chapter 17.4 that when we assume all internal forces are directed τ along the line connecting the two interacting objects then the internal torque about the point S is zero,
→τintS=→0
Equation (19.5.6) simplifies to
i=N∑j=1(→rS,j×→Fj)=j=N∑j=1→τS,j=→τextS
Therefore Equation (19.5.5) becomes
→τextS=d→LsysSdt
The external torque about the point S is equal to the time derivative of the angular momentum of the system about that point.
Example 19.6.1: Angular Momentum of Two Particles undergoing Circular Motion
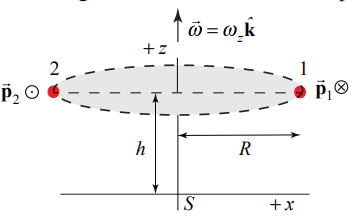
Two identical particles of mass m move in a circle of radius R, with angular velocity →ω=ωzˆk,ωz>0, ω about the z -axis in a plane parallel to but a distance h above the x-y plane. The particles are located on opposite sides of the circle (Figure 19.11). Find the magnitude and the direction of the angular momentum about the point S (the origin).
Solution
The angular momentum about the origin is the sum of the contributions from each object. The calculation of each contribution will be identical to the calculation in Example 19.3
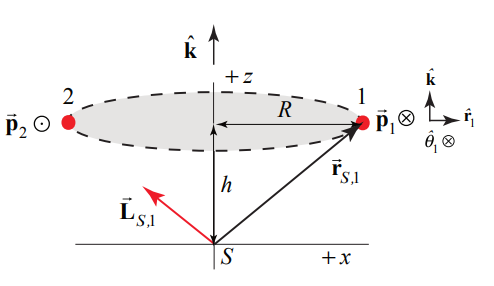
For particle 1 (Figure 19.12), the angular momentum about the point S is
→LS,1=→rS,1×→p1=(Rˆr1+hˆk)×mRωzˆθ1=mR2ωzˆk−hmRωzˆr1
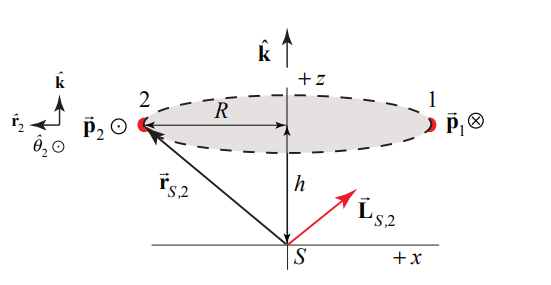
For particle 2, (Figure 19.13), the angular momentum about the point S is
→LS,2=→rS,2×→p2=(Rˆr2+hˆk)×mRωzˆθ2=mR2ωzˆk−hmRωzˆr2
Because the particles are located on opposite sides of the circle, ˆr1=−ˆr2. The vector sum only points along the z -axis and is equal to
→Ls=→LS,1+→LS,2=2mR2ωzˆk
The two angular momentum vectors are shown in Figure 19.14.
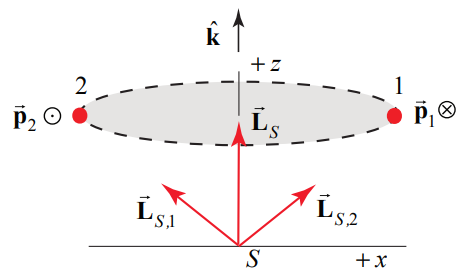
The moment of inertia of the two particles about the z -axis is given by IS=2mR2. Therefore →LS=IS→ω. The important point about this example is that the two objects are symmetrically distributed with respect to the z -axis (opposite sides of the circular orbit). Therefore the angular momentum about any point S along the z -axis has the same value →Ls=2mr2ωˆk which is constant in magnitude and points in the + z -direction. This result generalizes to any rigid body in which the mass is distributed symmetrically about the axis of rotation.
Example 19.6.2: Angular Momentum of a System of Particles about Different Points
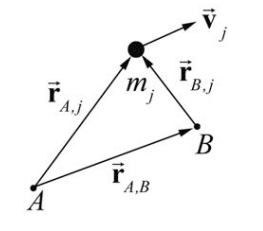
Consider a system of N particles, and two points A and B (Figure 19.15). The angular momentum of the jih particle about the point A is given by
→LA,j=→rA,j×mj→vj
The angular momentum of the system of particles about the point A is given by the sum
→LA=N∑j=1→LA,j=N∑j=1→rA,j×mj→vj
The angular momentum about the point B can be calculated in a similar way and is given by
→LB=N∑j=1→LB,j=N∑j=1→rB,j×mj→vj
From Figure 19.15, the vectors
→rA,j=→rB,j+→rA,B
We can substitute Equation (19.5.14) into Equation (19.5.12) yielding
→LA=N∑j=1(→rB,j+→rA,B)×mj→vj=N∑j=1→rB,j×mj→vj+N∑j=1→rA,B×mj→vj
The first term in Equation (19.5.15) is the angular momentum about the point B . The vector →rA,B is a constant and so can be pulled out of the sum in the second term, and Equation (19.5. 15) becomes
→LA=→LB+→rA,B×N∑j=1mj→vj
The sum in the second term is the momentum of the system
→psys=N∑j=1mj→vj
Therefore the angular momentum about the points A and B are related by
→LA=→LB+→rA,B×→psys
Thus if the momentum of the system is zero, the angular momentum is the same about any point.
→LA=→LB,(→psys=→0)
In particular, the momentum of a system of particles is zero by definition in the center of mass reference frame because in that reference frame →psys=→0. Hence the angular momentum is the same about any point in the center of mass reference frame.