Autonomous systems are defined as dynamic systems whose equations of motion do not depend on time explicitly. For the effectively-1D (and in particular the really-1D) systems obeying Eq. (4), this means that their function Uef, and hence the Lagrangian function (3) should not depend on time explicitly. According to Eqs. (2.35), in such systems, the Hamiltonian function (7), i.e. the sum Tef +Uef, is an integral of motion. However, be careful! Generally, this conclusion is not valid for the mechanical energy E of such a system; for example, as we already know from Sec. 2.2, for our testbed problem, with the generalized coordinate q=θ (Figure 2.1), E is not conserved.
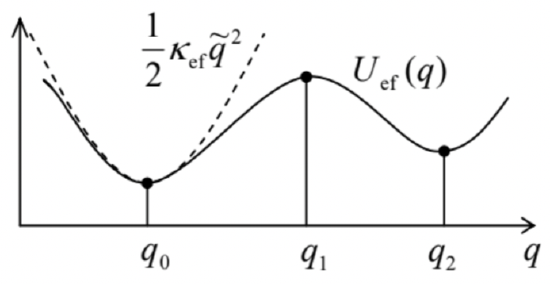
According to Eq. (4), an autonomous system, at appropriate initial conditions, may stay in equilibrium at one or several stationary (alternatively called fixed) points qn, corresponding to either the minimum or a maximum of the effective potential energy (see Figure 1): dUefdq(qn)=0
Figure 3.1. The effective potential energy profile near stable (q0,q2) and unstable (q1) fixed points, and its quadratic approximation (10) near point q0 - schematically.
In order to explore the stability of such fixed points, let us analyze the dynamics of small deviations ˜q(t)≡q(t)−qn
from the equilibrium. For that, let us expand the function Uef (q) in the Taylor series at a fixed point: Uef(q)=Uef(qn)+dUefdq(qn)˜q+12d2Uefdq2(qn)˜q2+…
The first term on the right-hand side, Uef (qn), is arbitrary and does not affect motion. The next term, linear in deviation ˜q, equals zero - see the fixed point’s definition (8). Hence the fixed point stability is determined by the next term, quadratic in ˜q, more exactly by its coefficient, κef≡d2Uefdq2(qn),
which plays the role of the effective spring constant. Indeed, neglecting the higher terms of the Taylor expansion (10),1 we see that Eq. (4) takes the familiar form: mef¨˜q+κef˜q=0.
I am confident that the reader of these notes knows everything about this equation, but since we will soon run into similar but more complex equations, let us review the formal procedure of its solution. From the mathematical standpoint, Eq. (12) is an ordinary, linear differential equation of the second order, with constant coefficients. The theory of such equations tells us that its general solution (for any initial conditions) may be represented as ˜q(t)=c+eλ+t+c−eλ−t,
where the constants c±are determined by initial conditions, while the so-called characteristic exponents λ±are completely defined by the equation itself. To calculate these exponents, it is sufficient to plug just one partial solution, eλt, into the equation. In our simple case (12), this yields the following characteristic equation: mefλ2+κef=0.
If the ratio kef/mef is positive, i.e. the fixed point corresponds to the minimum of potential energy (e.g., see points q0 or q2 in Figure 1), the characteristic equation yields λ±=±iω0, with ω0≡(κef mef )1/2,
(where i is the imaginary unit, i2=−1 ), so that Eq. (13) describes sinusoidal oscillations of the system, 2˜q(t)=c+e+iω0t+c−e−iω0t≡cccosω0t+cssinω0t,
with the frequency ω0, about the fixed point - which is thereby stable. 3 On the other hand, at the potential energy maximum (kef <0, e.g., at point q1 in Figure 1), we get λ±=±λ,λ≡(|κef|mef)1/2,˜q(t)=c+e+λt+c−e−λt
Since the solution has an exponentially growing part, 4 the fixed point is unstable.
Note that the quadratic expansion of function Uef(q), given by the truncation of Eq. (10) to the three displayed terms, is equivalent to a linear Taylor expansion of the effective force: Fef ≡−dUef dq≈−κef ˜q,
immediately resulting in the linear equation (12). Hence, to analyze the stability of a fixed point qn, it is sufficient to linearize the equation of motion with respect to small deviations from the point, and study possible solutions of the resulting linear equation. This linearization procedure is typically simpler to carry out than the quadratic expansion (10).
As an example, let us return to our testbed problem (Figure 2.1) whose function Uef we already know - see the second of Eqs. (6). With it, the equation of motion (4) becomes mR2¨θ=−dUefdθ=mR2(ω2cosθ−Ω2)sinθ, i.e. ¨θ=(ω2cosθ−Ω2)sinθ,
where Ω≡(g/R)1/2 is the frequency of small oscillations of the system at ω=0 - see Eq. ( 2.26).5 From requirement (8), we see that on any 2π-long segment of the angle θ,6 the system may have four fixed points; for example, on the half-open segment (−π,+π] these points are θ0=0,θ1=π,θ2,3=±cos−1Ω2ω2.
The last two fixed points, corresponding to the bead shifted to either side of the rotating ring, exist only if the angular velocity ω of the rotation exceeds Ω. (In the limit of very fast rotation, ω>>Ω, Eq. (20) yields θ2,3→±π/2, i.e. the stationary positions approach the horizontal diameter of the ring - in accordance with our physical intuition.)To analyze the fixed point stability, we may again use Eq. (9), in the form θ=θn+˜θ, plug it into Eq. (19), and Taylor-expand the trigonometric functions of θ up to the first term in ˜θ : ¨˜θ=[ω2(cosθn−sinθn˜θ)−Ω2](sinθn+cosθn˜θ).
Generally, this equation may be linearized further by purging its right-hand side of the term proportional to ˜θ2; however in this simple case, Eq. (21) is already convenient for analysis. In particular, for the fixed point θ0=0 (corresponding to the bead’s position at the bottom of the ring), we have cosθ0=1 and sinθ0=0, so that Eq. (21) is reduced to a linear differential equation ¨˜θ=(ω2−Ω2)˜θ,
whose characteristic equation is similar to Eq. (14) and yields λ2=ω2−Ω2, for θ≈θ0.
This result shows that if ω<Ω, when both roots λ are imaginary, this fixed point is orbitally stable. However, if the rotation speed is increased so that ω>Ω, the roots become real, λ±=(ω2−Ω2)1/2, with one of them positive, so that the fixed point becomes unstable beyond this threshold, i.e. as soon as fixed points θ2,3 exist. Absolutely similar calculations for other fixed points yield λ2={Ω2+ω2>0, for θ≈θ1,Ω2−ω2, for θ≈θ2,3.
These results show that the fixed point θ1 (bead on the top of the ring) is always unstable - just as we could foresee, while the side fixed points θ2,3 are orbitally stable as soon as they exist (at ω>Ω ).
Thus, our fixed-point analysis may be summarized very simply: an increase of the ring rotation speed ω beyond a certain threshold value, equal to Ω given by Eq. (2.26), causes the bead to move to one of the ring sides, oscillating about one of the fixed points θ2,3. Together with the rotation about the vertical axis, this motion yields quite a complex (generally, open) spatial trajectory as observed from a lab frame, so it is fascinating that we could analyze it quantitatively in such a simple way.
Later in this course, we will repeatedly use the linearization of the equations of motion for the analysis of stability of more complex systems, including those with energy dissipation.
1 Those terms may be important only in very special cases then κef is exactly zero, i.e. when a fixed point is an inflection point of the function Uer(q).
2 The reader should not be scared of the first form of (16), i.e. of the representation of a real variable (the deviation from equilibrium) via a sum of two complex functions. Indeed, any real initial conditions give c∗−=c+, so that the sum is real for any t. An even simpler way to deal with such complex representations of real functions will be discussed in the beginning of the next chapter, and then used throughout the series.
3 This particular type of stability, when the deviation from the equilibrium oscillates with a constant amplitude, neither growing nor decreasing in time, is called either the orbital, or "neutral", or "indifferent" stability.
4 Mathematically, the growing part vanishes at some special (exact) initial conditions which give c+=0. However, the futility of this argument for real physical systems should be obvious for anybody who had ever tried to balance a pencil on its sharp point.
5 Note that Eq. (19) coincides with Eq. (2.25). This is a good sanity check illustrating that the procedure (5)-(6) of moving of a term from the potential to the kinetic energy within the Lagrangian function is indeed legitimate.
6 For this particular problem, the values of θ that differ by a multiple of 2π, are physically equivalent.