
30.6: Ball Rolling on Inclined Rotating Plane

( \newcommand{\kernel}{\mathrm{null}\,}\)
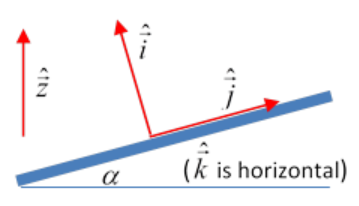
We’ll take unit vectors ˆ→z pointing vertically up, ˆ→i perpendicularly up from the plane, the angle between these two unit vectors being α. (We will need a set of orthogonal unit vectors ˆ→i,ˆ→j,ˆ→k, not fixed in the plane, but appropriately oriented, with ˆ→k horizontal.) The vector to the center of the sphere (radius a, mass m ) from an origin on the axis of rotation, at a point a above the plane, is →r. The contact reaction force of the plane on the sphere is →R.
The equations of motion are:
m¨→r=→R−mgˆ→z,I˙→Ω=−aˆ→i×→R
and the equation of rolling contact is ˙→r−a→Ω׈→i=^ωi×→r.
First, we eliminate →R from the equations of motion to give
˙→Ω=(am/I)(¨→r+gˆ→z)׈→i
Note that ˙→Ω⋅ˆ→i=0, so the spin in the direction normal to the plane is constant, →Ω⋅ˆ→i=n say. (Both forces on the sphere have zero torque about this axis.)
Integrating,
→Ω+ const. =(ma/I)(˙→r+gtˆ→z)׈→i
Now eliminate →Ω by multiplying both sides by ×→i and using the equation of rolling contact
˙→r−a→Ω׈→i=ωˆ→i×→r
to find:
(ma2/I)[(˙→r+gtˆ→z)׈→i]׈→i=a→Ω׈→i+ const. =˙→r−ωˆ→i×→r+ const.
then using (˙→r׈→i)׈→i=−˙→r,(ˆ→z׈→i)׈→i=−ˆ→j, we find
˙→r(1+ma2/I)+(ma2/I)gtˆ→jsinα+ const. =ω^veci×→r
The constant is fixed by the initial position →r0, giving finally
˙→r=ω1+ma2/Iˆ→i×[(→r−→r0)+ma2/Iωgtˆ→ksinα]
The first term in the square brackets would give the same circular motion we found for the horizontal rotating plane, the second term adds a steady motion of the center of this circle, in a horizontal direction (not down the plane!) at constant speed (ma2/Iω)gsinα.
(This is identical to the motion of a charged particle in crossed electric and magnetic fields.)
Bottom line: the intuitive notion that a ball rolling on a rotating inclined turntable would tend to roll downhill is wrong! Recall that for a particle circling in a magnetic field, if an electric field is added perpendicular to the magnetic field, the particle moves in a cycloid at the same average electrical potential—it has no net movement in the direction of the electric field , only perpendicular to it. Our rolling ball follows an identical cycloidal path—keeping the same average gravitational potential.