
6.E: Lagrangian Dynamics (Exercises)





( \newcommand{\kernel}{\mathrm{null}\,}\)
- A disk of mass M and radius R rolls without slipping down a plane inclined from the horizontal by an angle α. The disk has a short weightless axle of negligible radius. From this axis is suspended a simple pendulum of length l<R and whose bob has a mass m. Assume that the motion of the pendulum takes place in the plane of the disk.
- What generalized coordinates would be appropriate for this situation?
- Are there any equations of constraint? If so, what are they?
- Find Lagrange’s equations for this system.
- A Lagrangian for a particular system can be written as
L=m2(a˙x2+2b˙x˙y+c˙y2)−K2(ax2+2bxy+cy2)
where a,b, and c are arbitrary constants, but subject to the condition that b2−4ac≠0.
- What are the equations of motion?
- Examine the case a=0=c. What physical system does this represent?
- Examine the case b=0 and a=−c. What physical system does this represent?
- Based on your answers to (b) and (c), determine the physical system represented by the Lagrangian given above.
- Consider a particle of mass m moving in a plane and subject to an inverse square attractive force.
- Obtain the equations of motion.
- Is the angular momentum about the origin conserved?
- Obtain expressions for the generalized forces. Recall that the generalized forces are defined by Qj=∑iFi∂xi∂qj.
- Consider a Lagrangian function of the form L(qi,˙qi,¨qi,t). Here the Lagrangian contains a time derivative of the generalized coordinates that is higher than the first. When working with such Lagrangians, the term “generalized mechanics” is used.
- Consider a system with one degree of freedom. By applying the methods of the calculus of variations, and assuming that Hamilton’s principle holds with respect to variations which keep both q and ˙q fixed at the end points, show that the corresponding Lagrange equation is
d2dt2(∂L∂¨q)−ddt(∂L∂˙q)+∂L∂q=0.
Such equations of motion have interesting applications in chaos theory.
- Apply this result to the Lagrangian
L=−m2q¨q−k2q2.
Do you recognize the equations of motion?
- Consider a system with one degree of freedom. By applying the methods of the calculus of variations, and assuming that Hamilton’s principle holds with respect to variations which keep both q and ˙q fixed at the end points, show that the corresponding Lagrange equation is
- A bead of mass m slides under gravity along a smooth wire bent in the shape of a parabola x2=az in the vertical (x,z) plane.
- What kind (holonomic, nonholonomic, scleronomic, rheonomic) of constraint acts on m?
- Set up Lagrange’s equation of motion for x with the constraint embedded.
- Set up Lagrange’s equations of motion for both x and z with the constraint adjoined and a Lagrangian multiplier λ introduced.
- Show that the same equation of motion for x results from either of the methods used in part (b) or part (c).
- Express λ in terms of x and ˙x.
- What are the x and z components of the force of constraint in terms of x and ˙x?
- Consider the two Lagrangians
L(q,˙q;t)andL′(q,˙q;t)=L(q,˙q;t)+dF(q,t)dt
where F(q,t) is an arbitrary function of the generalized coordinates q(t). Show that these two Lagrangians yield the same Euler-Lagrange equations. As a consequence two Lagrangians that differ only by an exact time derivative are said to be equivalent.
- Consider the double pendulum comprising masses m1 and m2 connected by inextensible strings as shown in the figure. Assume that the motion of the pendulum takes place in a vertical plane.
- Are there any equations of constraint? If so, what are they?
- Find Lagrange’s equations for this system.
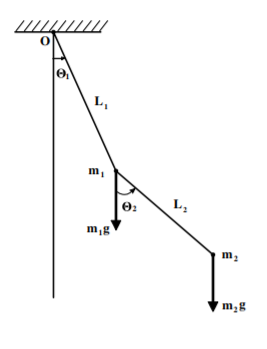
Figure 6.E.1
- Consider the system shown in the figure which consists of a mass m suspended via a constrained massless link of length L where the point A is acted upon by a spring of spring constant k. The spring is unstretched when the massless link is horizontal. Assume that the holonomic constraints at A and B are frictionless.
- Derive the equations of motion for the system using the method of Lagrange multipliers.
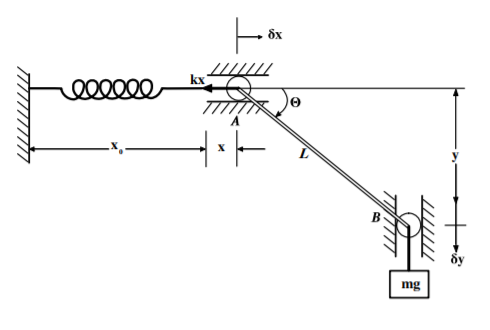
Figure 6.E.2
- Derive the equations of motion for the system using the method of Lagrange multipliers.
- Consider a pendulum, with mass m, connected to a (horizontally) moveable support of mass M.
- Determine the Lagrangian of the system.
- Determine the equations of motion for θ≪1.
- Find an equation of motion in θ alone. What is the frequency of oscillation?
- What is the frequency of oscillation for M≫m? Does this make sense?
- A sphere of radius ρ is constrained to roll without slipping on the lower half of the inner surface of a hollow cylinder of radius R. Determine the Lagrangian function, the equation of constraint, and the Lagrange equations of motion. Find the frequency of small oscillations.
- A particle moves in a plane under the influence of a force f=−Arα−1 directed toward the origin; A and α(>0) are constants. Choose generalized coordinates with the potential energy zero at the origin.
- Find the Lagrangian equations of motion.
- Is the angular momentum about the origin conserved?
- Is the total energy conserved?
- Two blocks, each of mass M, are connected by an extensionless, uniform string of length l. One block is placed on a frictionless horizontal surface, and the other block hangs over the side, the string passing over a frictionless pulley. Describe the motion of the system:
- when the mass of the string is negligible
- when the string has mass m.
- Two masses m1 and m2 (m1≠m2) are connected by a rigid rod of length d and of negligible mass. An extensionless string of length l1 is attached to m1 and connected to a fixed point of the support P. Similarly a string of length l2 (l1≠l2) connects m2 and P. Obtain the equation of motion describing the motion in the plane of m1,m2, and P, and find the frequency of small oscillation around the equilibrium position.
- A thin uniform rigid rod of length 2L and mass M is suspended by a massless string of length l. Initially the system is hanging vertically downwards in the gravitational field g. Use as generalized coordinates the angles given in the diagram.
- Derive the Lagrangian for the system.
- Use the Lagrangian to derive the equations of motion
- A horizontal impulsive force Fx in the x direction strikes the bottom end of the rod for an infinitessimal time τ. Derive the initial conditions for the system immediately after the impulse has occurred.
- Draw a diagram showing the geometry of the pendulum shortly after the impulse when the displacement angles are significant.
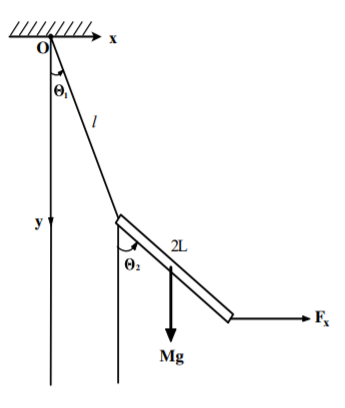
Figure 6.E.3