
13.13: Euler Angles
- Page ID
- 14185

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)The description of rigid-body rotation is greatly facilitated by transforming from the space-fixed coordinate frame \((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) to a rotating body-fixed coordinate frame \((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) for which the inertia tensor is diagonal. Appendix \(19.4\) introduced the rotation matrix \(\{\boldsymbol{\lambda}\}\) which can be used to rotate between the space-fixed coordinate system, which is stationary, and the instantaneous bodyfixed frame which is rotating with respect to the spacefixed frame. The transformation can be represented by a matrix equation
\[(\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}}) = \{\boldsymbol{\lambda}\} \cdot (\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\]
where the space-fixed system is identified by unit vectors \((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) while \((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) defines unit vectors in the rotated body-fixed system. The rotation matrix \(\{\boldsymbol{\lambda}\}\) completely describes the instantaneous relative orientation of the two systems. Rigid-body rotation requires three independent angular parameters that specify the orientation of the rigid body such that the corresponding orthogonal transformation matrix is proper, that is, it has a determinant \(|\lambda | = +1\) as given by equation \((19.4.33)\).
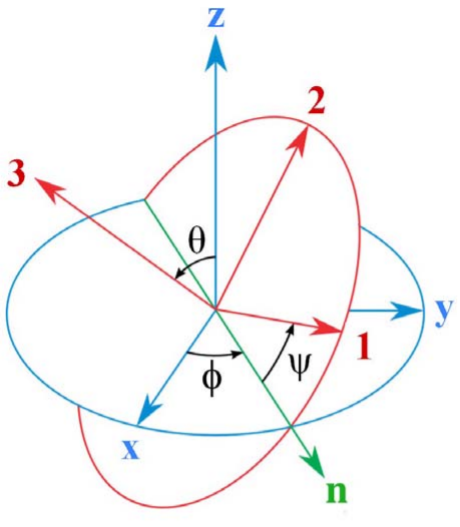
As discussed in Appendix \(19.4.2\), the 9 component rotation matrix involves only three independent angles. There are many possible choices for these three angles. It is convenient to use the Euler angles, \(\phi , \theta , \psi ,\) (also called Eulerian angles) shown in Figure \(\PageIndex{1}\).1 The Euler angles are generated by a series of three rotations that rotate from the space-fixed \((\mathbf{\hat{x}}, \mathbf{\hat{y}},\mathbf{\hat{z}})\) system to the bodyfixed \((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\) system. The rotation must be such that the space-fixed \(z\) axis rotates by an angle \(\theta\) to align with the body-fixed 3 axis. This can be performed by rotating through an angle \(\theta\) about the \(\mathbf{\hat{n}} \equiv \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) direction, where \(\mathbf{\hat{z}}\) and \(\mathbf{\hat{3}}\) designate the unit vectors along the “\(z\)” axes of the space and body fixed frames respectively. The unit vector \(\mathbf{\hat{n}} \equiv \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) is the vector normal to the plane defined by the \(\mathbf{\hat{z}}\) and \(\mathbf{\hat{3}}\) unit vectors and this unit vector \(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) is called the line of nodes. The chosen convention is that the unit vector \(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) is along the “\(x\)” axis of an intermediate-axis frame designated by \((\mathbf{\hat{n}}, \mathbf{\hat{y}}^{\prime} ,\mathbf{\hat{z}})\), that is, the unit vector \(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) plus the unit vectors \(\mathbf{\hat{y}}^{\prime}\) and \(\mathbf{\hat{z}}\) are in the same plane as the \(\mathbf{\hat{z}}\) and \(\mathbf{\hat{3}}\) unit vectors. The sequence of three rotations is performed as summarized below.
1) Rotation \(\phi\) about the space-fixed \(\mathbf{\hat{z}}\) axis from the space \(\mathbf{\hat{x}}\) axis to the line of nodes \(\mathbf{\hat{n}}\):
The first rotation \((\mathbf{x}, \mathbf{y}, \mathbf{z}) \cdot \boldsymbol{\lambda}_{\phi} \rightarrow (\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z})\) is in a right-handed direction through an angle \(\phi\) about the space-fixed \(\mathbf{z}\) axis. Since the rotation takes place in the \(\mathbf{x} − \mathbf{y}\) plane, the transformation matrix is
\[\{\boldsymbol{\lambda}_{\phi} \} = \begin{pmatrix} \cos \phi & \sin \phi & 0 \\ − \sin \phi & \cos \phi & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
This leads to the intermediate coordinate system \((\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z})\) where the rotated \(\mathbf{x}\) axis now is colinear with the \(\mathbf{n}\) axis of the intermediate frame, that is, the line of nodes.
\[(\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z}) = \{\boldsymbol{\lambda}_{\phi} \} \cdot (\mathbf{x}, \mathbf{y}, \mathbf{z}) \]
The precession angular velocity \(\dot{\phi}\) is the rate of change of angle of the line of nodes with respect to the space \(x\) axis about the space-fixed \(z\) axis.
2) Rotation \(\theta\) about the line of nodes \(\mathbf{\hat{n}}\) from the space \(\mathbf{\hat{z}}\) axis to the body-fixed \(\mathbf{\hat{3}}\) axis:
The second rotation
\[(\mathbf{n}, \mathbf{y}^{\prime} , \mathbf{z}) \cdot \lambda_{\theta} \rightarrow (\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3}) \]
is in a right-handed direction through the angle \(\theta\) about the \(\mathbf{\hat{n}}\) axis (line of nodes) so that the “\(z\)” axis becomes colinear with the body-fixed \(\mathbf{\hat{3}}\) axis. Because the rotation now is in the \(\mathbf{\hat{z}}−\mathbf{\hat{3}}\) plane, the transformation matrix is
\[\{\boldsymbol{\lambda}_{\theta} \} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos \theta & \sin \theta \\ 0 & − \sin \theta & \ cos \theta \end{pmatrix} \]
The line of nodes which is at the intersection of the space-fixed and body-fixed planes, shown in Figure \(\PageIndex{1}\), points in the \(\mathbf{\hat{n}} = \mathbf{\hat{z}} \times \mathbf{\hat{3}}\) direction. The new “\(z\)” axis now is the body-fixed \(\mathbf{\hat{3}}\) axis. The angular velocity \(\dot{\theta}\) is the rate of change of angle of the body-fixed \(\mathbf{\hat{3}}\)-axis relative to the space-fixed \(\mathbf{\hat{z}}\)-axis about the line of nodes.
3) Rotation \(\psi\) about the body-fixed \(\mathbf{\hat{3}}\) axis from the line of nodes to the body-fixed \(\mathbf{\hat{1}}\) axis:
The third rotation
\[(\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3}) \cdot \lambda_{\psi} \rightarrow (\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}}) \]
is in a right-handed direction through the angle \(\psi\) about the new body-fixed \(\mathbf{\hat{3}}\) axis. This third rotation transforms the rotated intermediate \((\mathbf{n}, \mathbf{y}^{\prime\prime}, \mathbf{3})\) frame to final body-fixed coordinate system \((\mathbf{\hat{1}}, \mathbf{\hat{2}}, \mathbf{\hat{3}})\). The transformation matrix is
\[\{\boldsymbol{\lambda}_{\psi} \} = \begin{pmatrix} \cos \psi & \sin \psi & 0 \\ − \sin\psi & \cos \psi & 0 \\ 0 & 0 & 1 \end{pmatrix} \]
The spin angular velocity \(\dot{\psi}\) is the rate of change of the angle of the body-fixed \(\mathbf{1}\)-axis with respect to the line of nodes about the body-fixed \(\mathbf{3}\) axis.
The total rotation matrix \(\{\boldsymbol{\lambda}\}\) is given by
\[\{\boldsymbol{\lambda}\} = \{\boldsymbol{\lambda}_{\psi} \} \cdot \{\boldsymbol{\lambda}_{\theta} \} \cdot \{\boldsymbol{\lambda}_{\phi} \} \label{13.81}\]
Thus the complete rotation from the space-fixed \((\mathbf{x}, \mathbf{y}, \mathbf{z})\) axis system to the body-fixed \((\mathbf{1}, \mathbf{2}, \mathbf{3})\) axis system is given by
\[(\mathbf{1}, \mathbf{2}, \mathbf{3}) = \{\boldsymbol{\lambda}\} \cdot (\mathbf{x}, \mathbf{y}, \mathbf{z}) \]
where \(\{\boldsymbol{\lambda}\}\) is given by the triple product Equation \ref{13.81} leading to the rotation matrix
\[\{\boldsymbol{\lambda}\} = \begin{pmatrix} \cos \phi \cos \psi − \sin \phi \cos \theta \sin \psi & \sin \phi \cos \psi + \cos \phi \cos \theta \sin \psi & \sin \theta \sin \psi \\ − \cos \phi \sin \psi − \sin \phi \cos \theta \cos \psi & − \sin \phi \sin \psi + \cos \phi \cos \theta \cos \psi & \sin \theta \cos \psi \\ \sin \phi \sin \theta & − \cos \phi \sin \theta & \cos \theta \end{pmatrix} \]
The inverse transformation from the body-fixed axis system to the space-fixed axis system is given by
\[(\mathbf{x}, \mathbf{y}, \mathbf{z}) = \{\boldsymbol{\lambda}\}^{− 1} \cdot (\mathbf{1}, \mathbf{2}, \mathbf{3}) \]
where the inverse matrix \(\{\boldsymbol{\lambda}\}^{−1}\) equals the transposed rotation matrix \(\{\boldsymbol{\lambda}\}^{T}\), that is,
\[\{\boldsymbol{\lambda}\}^{−1} = \{\boldsymbol{\lambda}\}^T = \begin{pmatrix} \cos \phi \cos \psi − \sin \phi \cos \theta \sin \psi & − \cos \phi \sin \psi − \sin \phi \cos \theta \cos \psi & \sin \phi \sin \theta \\ \sin \phi \cos \psi + \cos \phi \cos \theta \sin \psi & − \sin \phi \sin \psi + \cos \phi \cos \theta \cos \psi & - \cos \phi \sin \theta \\ \sin \theta \sin \psi & \sin \theta \cos \psi & \cos \theta \end{pmatrix} \]
Taking the product \(\{\boldsymbol{\lambda}\} \{\boldsymbol{\lambda}\}^{ −1} = 1\) shows that the rotation matrix is a proper, orthogonal, unit matrix.
The use of three different coordinate systems, space-fixed, the intermediate line of nodes, and the body-fixed frame can be confusing at first glance. Basically the angle \(\phi\) specifies the rotation about the space-fixed \(z\) axis between the space-fixed \(x\) axis and the line of nodes of the Euler angle intermediate frame. The angle \(\psi\) specifies the rotation about the body-fixed 3 axis between the line of nodes and the body-fixed 1 axis. Note that although the space-fixed and body-fixed axes systems each are orthogonal, the Euler angle basis in general is not orthogonal. For rigid-body rotation the rotation angle \(\phi\) about the space-fixed \(z\) axis is time dependent, that is, the line of nodes is rotating with an angular velocity \(\dot{\phi}\) with respect to the space-fixed coordinate frame. Similarly the body-fixed coordinate frame is rotating about the body-fixed 3 axis with angular velocity \(\dot{\psi}\) relative to the line of nodes.
Example \(\PageIndex{1}\): Euler angle transformation
The definition of the Euler angles can be confusing, therefore it is useful to illustrate their use for a rotational transformation of a primed frame \((x^{\prime}, y^{\prime} , z^{\prime} )\) to an unprimed frame \((x,y,z)\). Assume the first rotation about the \(z^{\prime}\) axis, is \(\phi = 30^{\circ}\)
\[ \lambda_{\phi} = \begin{pmatrix} \frac{\sqrt{3}}{2} & \frac{1}{2} & 0 \\ −\frac{1}{2} & \frac{\sqrt{3}}{2} & 0 \\ 0 & 0 & 1 \end{pmatrix} \notag\]
Let the second rotation be \(\theta = 45^{\circ}\) about the line of nodes, that is, the intermediate \(x\)” axis. Then
\[\lambda_{\theta} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ 0 & -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix} \notag\]
Let the third rotation be \(\psi = 90^{\circ}\) about the \(z\) axis.
\[\lambda_{\psi} = \begin{pmatrix} 0 & 1 & 0 \\ −1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix} \notag\]
Thus the net rotation corresponds to \(\lambda = \lambda_{\psi} \lambda_{\theta} \lambda_{\phi}\)
\[\lambda = \begin{pmatrix} \frac{\sqrt{3}}{2} & \frac{1}{2} & 0 \\ −\frac{1}{2} & \frac{\sqrt{3}}{2} & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ 0 & -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix} \begin{pmatrix} 0 & 1 & 0 \\ −1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} -\frac{1}{4}\sqrt{2} & \frac{1}{2}\sqrt{3} & \frac{1}{4}\sqrt{2} \\ −\frac{1}{4}\sqrt{6} & -\frac{1}{2} & \frac{1}{4}\sqrt{6} \\ \frac{1}{2}\sqrt{2} & 0 & \frac{1}{2}\sqrt{2} \end{pmatrix} \notag\]
1The space-fixed coordinate frame and the body-fixed coordinate frames are unambiguously defined, that is, the space-fixed frame is stationary while the body-fixed frame is the principal-axis frame of the body. There are several possible intermediate frames that can be used to define the Euler angles. The \(z-x-z\) sequence of rotations, used here, is used in most physics textbooks in classical mechanics. Unfortunately scientists and engineers use slightly different conventions for defining the Euler angles. As discussed in Appendix A of "Classical Mechanics" by Goldstein, nuclear and particle physicists have adopted the \(z-y-z\) sequence of rotations while the US and UK aerodynamicists have adopted a \(x-y-z\) sequence of rotations.