
6.2: Body Levers
- Page ID
- 17750

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Lever Classes
A lever is a rigid object used to make it easier to move a large load a short distance or a small load a large distance. There are three classes of levers, and all three classes are present in the body[1][2]. For example, the forearm is a 3rd class lever because the biceps pulls on the forearm between the joint (fulcrum) and the ball (load). To see these body levers in action check out this short video animation identifying levers in the body.
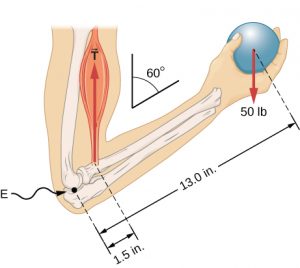
The elbow joint flexed to form a 60° angle between the upper arm and forearm while the hand holds a 50 lb ball . Image Credit: Openstax University Physics
Using the standard terminology of levers, the forearm is the lever, the biceps tension is the effort, the elbow joint is the fulcrum, and the ball weight is the resistance. When the resistance is caused by the weight of an object we call it the load. The lever classes are identified by the relative location of the resistance, fulcrum and effort. First class levers have the fulcrum in the middle, between the load and resistance. Second class levers have resistance in the middle. Third class levers have the effort in the middle.
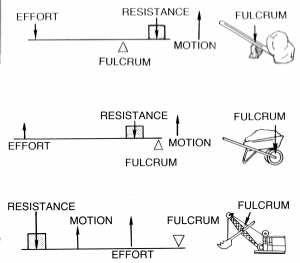
First (top), second(middle), and third(bottom) class levers and real-world examples of each. Image Credit: Pearson Scott Foresman
For all levers the effort and resistance (load) are actually just forces that are creating torques because they are trying to rotate the lever. In order to move or hold a load the torque created by the effort must be large enough to balance the torque caused by the load. Remembering that torque increases as the force is applied farther from the pivot, the effort needed to balance the resistance must depend on the distances of the effort and resistance from the pivot. These distances are known as the effort arm and resistance arm (load arm).
Reinforcement Activity
Identify the class of lever created by the foot and the calf muscle when raising the heel off the ground.
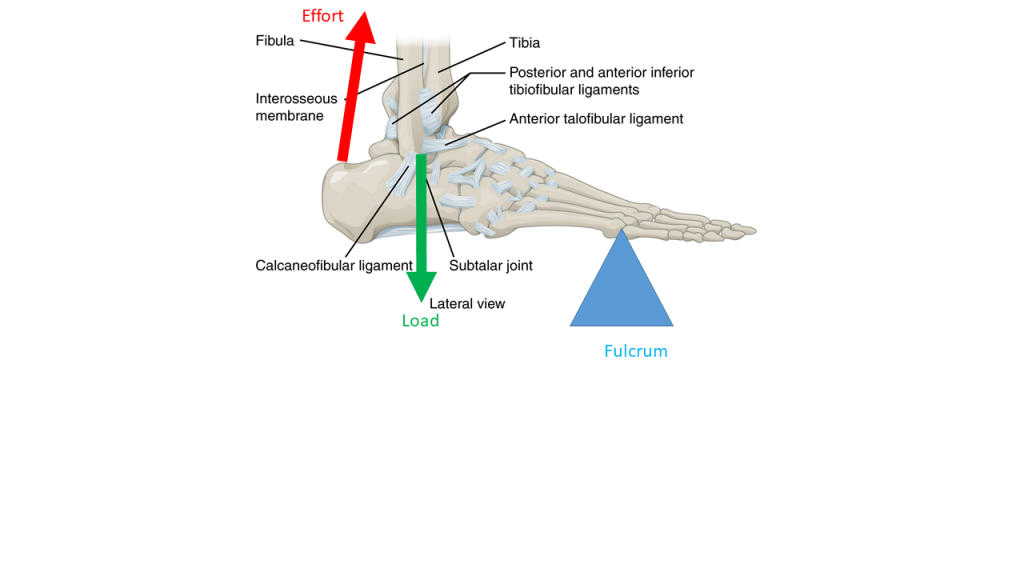
The foot acting as a lever arm with calf muscle supplying an upward effort, the weight of the body acting as downward load, and the ball of the foot acting as the fulcrum. Image adapted from OpenStax Anatomy and Physiology
Mechanical Advantage
The ratio of load to effort is known as the mechanical advantage (MA). For example if you used a second class lever (like a wheelbarrow) to move 200 lbs of dirt by lifting with only 50 lbs of effort the mechanical advantage would be four.
Increasing effort arm reduces the size of the effort needed to balance the load, which means greater mechanical advantage. In fact for a lever, the mechanical advantage is equal to the ratio of the effort arm to resistance arm.

Bicep Tension
We are now ready to determine the bicep tension in our forearm problem. The effort arm was 1.5 in and the load arm was 13.0 in, so the load arm is 8.667 times longer than the effort arm.

That means that the effort needs to be 8.667 times larger than the load, so for the 50 lb load the bicep tension would need to be 433 lbs! That may seem large, but we will find out that such forces are common in the tissues of the body!
*Adjusting Significant Figures
Finally, we should make sure our answer has the correct significant figures. The weight of the ball in the example is not written in scientific notation, so it’s not really clear if the zeros are placeholders or if they are significant. Let’s assume the values were not measured, but were chosen hypothetically, in which case they are exact numbers like in a definition and don’t affect the significant figures. The forearm length measurement includes zeros behind the decimal that would be unnecessary for a definition, so they suggest a level of precision in a measurement. We used those values in multiplication and division so we should round the answer to only two significant figures, because 1.5 in only has two (13.0 in has three). In that case we round our bicep tension to 430 lbs, which we can also write in scientific notation:  .
.
Reinforcement Activity
Calculate the mechanical advantage of the lever system in our forearm example. [Hint: your answer should be less than one.]
Range of Motion
We normally think of levers as helping us to use less effort to hold or move large loads, so our results for the forearm example might seem odd because we had to use a larger effort than the load. The bicep attaches close to the elbow so the effort arm is much shorter than the load arm and the mechanical advantage is less than one. That means the force provided by the bicep has to be much larger than the weight of the ball. That seems like a mechanical disadvantage, so how is that helpful? If we look at how far the weight moved compared to how far the bicep contracted when lifting the weight from a horizontal position we see that the purpose of the forearm lever is to increase range of motion rather than decrease effort required.
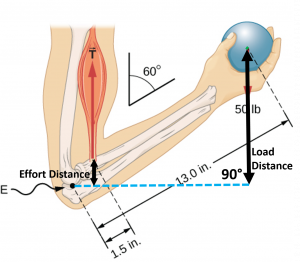
Diagram showing the difference in distance covered by the contracting bicep and the weight in the hand when moving the forearm from horizontal.Image Adapted from Openstax University Physics
Looking at the similar triangles in a stick diagram of the forearm we can see that the ratio of the distances moved by the effort and load must be the same as the ratio of effort arm to resistance arm. That means increasing the effort arm in order to decrease the size of the effort required will also decrease the range of motion by the same factor. Therefore the load was moved 8.667x farther than the distance contracted by the biceps muscle in our forearm example.
It’s interesting to note that while moving the attachment point of the bicep 20% closer to the hand would make you 20% stronger, you would then be able to move your hand over a 20% smaller range.
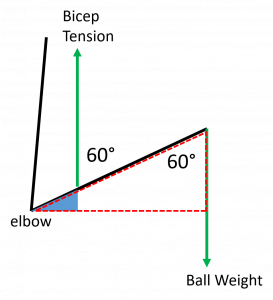
Diagram of the forearm as a lever, showing the similar triangles formed by parts of the forearm as it moves from 90 degrees to 60 degrees from horizontal. The hypotenuse (long side) of the smaller blue triangle is the effort arm and the hypotenuse of the larger dashed red triangle is the load arm. The vertical sides of the triangles are the distances moved by the effort (blue) and the load (dashed red).
For third class levers the load is always farther from the fulcrum than the effort, so they will always increase range of motion, but that means they will always increase the amount of effort required by the same factor. Even when the effort is larger than the load as for third class levers, we can still calculate a mechanical advantage, but it will come out to be less than one.
Second class levers always have the load farther from the pivot than the effort, so they will always allow a smaller effort to move a larger load, giving a mechanical advantage greater than one.
First class levers can either provide mechanical advantage or increase range of motion, depending on if the effort arm or load arm is longer, so they can have mechanical advantages of greater, or less, than one.
A lever cannot provide mechanical advantage and increase range of motion at the same time, so each type of lever has advantages and disadvantages:
| Lever Class | Advantage | Disadvantage |
| 3rd | Range of MotionThe load moves farther than the effort. (Short bicep contraction moves the hand far) | Effort RequiredRequires larger effort to hold smaller load. (Bicep tension greater than weight in hand) |
| 2nd | Effort RequiredSmaller effort will move larger load. (One calf muscle can lift entire body weight) | Range of MotionThe load moves a shorter distance than the effort. (Calf muscle contracts farther than the distance that the heel comes off the floor) |
| 1st (effort closer to pivot) | Range of MotionThe load moves farther than the effort. (Head moves farther up/down than neck muscles contract) | Effort RequiredRequires larger effort to hold smaller load. |
| 1st (load closer to pivot) | Effort RequiredSmaller effort will move larger load. | Range of MotionThe load moves shorter distance than the effort. |
Reinforcement Activity
If you used a wheelbarrow to move 200 lbs of dirt by lifting with 50 lbs of effort, what is the mechanical advantage?
If the handles of the wheelbarrow are 2.0 m from the wheel axle (fulcrum) then how far from the fulcrum is the center of gravity of the the dirt?
To lift the dirt load 3 in, what distance do you have to lift the handles?
- "Lever of a Human Body" by Alexandra, The Physics Corner↵
- "Kinetic Anatomy With Web Resource-3rd Edition " by Robert Behnke , Human Kinetics↵
- OpenStax University Physics, University Physics Volume 1. OpenStax CNX. Jul 11, 2018 http://cnx.org/contents/d50f6e32-0fda-46ef-a362-9bd36ca7c97d@10.18.↵
- "Lever" by Pearson Scott Foresman , Wikimedia Commons is in the Public Domain↵
- OpenStax, Anatomy & Physiology. OpenStax CNX. Jun 25, 2018 [1]http://cnx.org/contents/14fb4ad7-39a1-4eee-ab6e-3ef2482e3e22@10.1. ↵