
13.3: Acoustic Radiation and Antennas




( \newcommand{\kernel}{\mathrm{null}\,}\)
Any mechanically vibrating surface can radiate acoustic waves. As in the case of electromagnetic waves, it is easiest to understand a point source first, and then to superimpose such radiators in combinations that yield the total desired radiation pattern. Reciprocity applies to linear acoustics, so the receiving and transmitting properties of acoustic antennas are proportional, as they are for electromagnetic waves; i.e. G(θ,φ)∝A(θ,φ).
The acoustic wave equation for pressure permits analysis of an acoustic monopole radiator:
[∇2+(ω/cs)2]p_=0
If the acoustic radiator is simply an isolated sphere with a sinusoidally oscillating radius a_, then the source is spherically symmetric and so is the solution; thus ∂/∂θ=∂/∂φ=0. If we define ω/cs=k, then (???) becomes:
[r−2d(r2d/dr)+k2]p_=[d2/dr2+2r−1d/dr+k2]p_=0
This can be rewritten more simply as:
d2(rp_)/dr2+k2(rp_)=0
This equation is satisfied if rp_ is an exponential, so a radial acoustic wave propagating outward would have the form:
p_(r)=K_r−1e−jkr [N m−2]
The associated acoustic velocity →u_(r) follows from the complex form of Newton’s law (13.1.7): ∇p_≅−jωρo→u_ [N m−3]:
→u_(r)=−∇p_/jωro=ˆrK_(ηsr)−1[1+(jkr)−1]e−jkr
The first and second terms in the solution (???) correspond to the acoustic far field and acoustic near field, respectively. When kr >> 1 or, equivalently, r >> λ/2π, then the near field term can be neglected, so that the far-field velocity corresponding to (???) is:
→u_ff(r)=ˆrK_(ηsr)−1e−jkr[m s−1](far-field acoustic velocity)
The near-field velocity from (???) is:
→u_nf=−jK_ˆr(kηsr2)−1e−jkr [m s−1](near-field acoustic velocity)
Since k = ω/cs, the near-field velocity is proportional to ω-1, and becomes very large at low frequencies. Thus a velocity microphone, i.e., one that responds to acoustic velocity u rather than to pressure, will respond much more strongly to low frequencies than to high ones when the microphone is held close to one’s lips (r > λ/2π), although they are sensitive to local wind turbulence.
The acoustic intensity I(r) can be computed using (13.1.22) for a sphere of radius a_ oscillating with a surface velocity u_o at r = a. In this case →u_(a)=ˆru_o, and substituting this value for →u_ into (???) yields the constant K_=ju_0ηsa2; this near-field equation is appropriate only if a << λ/2π. Thus, using (???) and (???), the far field intensity is:
I=Re{pu_∗}/2=⌊K_|2/2ηsr2=ηs|2πu_0a2|2/2 [W m−2]label13.3.8
Integrating I over a sphere of radius r yields the total acoustic power transmitted:
Pt=2πηs|ωa2u_o/cs|2 [W](acoustic power radiated)
where 2π/λ = ω/cs has been substituted. Thus Pt is proportional to ηsω2a4(uo/cs)2. This suggests the importance of using a high frequency ω and large radius a if substantial power is to be radiated using a velocity source u_o.
If we imagine a Thevenin equivalent acoustic source providing a “current” of uo, then, using (???), the acoustic radiation resistance of this acoustic antenna is:
Rr=Pt/(|u_o|2/2)=4πηs(ka2)2 [kg s−1]
Arrays of such acoustic sources can synthesis a wide variety of antenna patterns because superposition applies and thus acoustic pressure and velocities will tend to cancel in some directions and add in others. For example, two such equal sources spaced distance d along the z axis, close compared to a wavelength and driven out of phase, would radiate the far-field pressure:
p_(r)≅(jkηsa2u_o/r)(e−jkr1−e−jkr2)=(2kηsa2u_o/r)sin[(kd/2)cosθ]e−jkr
where r1,2 ≅ r ± (d/2)cosθ. In the limit where kd = 2πd/λ << 1, (???) becomes:
p(r)≅(k2dηsa2u_o/r)cosθe−jkr
The radiated intensity I(θ) for this acoustic dipole is sketched in Figure 13.3.1(a), and is proportional to p2 and therefore to k4 and ω4.
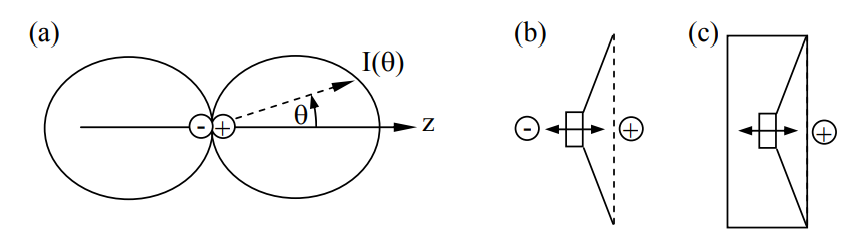
Thus it radiates poorly at low frequencies. Its acoustic antenna gain G(θ) is 3cos2θ, which can be computed by comparing the acoustic intensity I to the total acoustic power radiated Pt, just as is done for electromagnetic antennas. That is, the acoustic gain over an isotropic radiator is:
G(θ,ϕ)=I(θ,ϕ,r)/[Pt/4πr2](acoustic antenna gain)
Pt=∫2ππ0∫I(θ,ϕ,r)r20sinθ dθ dϕ [W]
A common way to produce this dipole acoustic pattern is illustrated in Figure 13.3.1(b) for the case of a loudspeaker with no baffling to block radiation from the back side of its vibrating speaker cone; the back side is clearly 180o out of phase with the velocity of the front side. The radiation from an unbaffled loudspeaker can unfortunately reflect from the walls of the room and interfere with the sound from the front side, reinforcing those frequencies for which the two rays add in phase, and diminishing those frequencies for which they are out of phase. As a result, most good loudspeakers are baffled so the reverse wave is trapped and cannot interfere with the primary wave radiated forward. This alters the acoustic impedance of the loudspeaker, but it can be electrically compensated. The result is an acoustic monopole that radiates total power in proportion to p2, k2, and therefore ω2, rather than ω4 as for the dipole.
A linear array of monopole acoustic sources of total length L has a diffraction pattern similar to that for an array of Hertzian dipoles. If the sources are all in phase, then they radiate maximum power broadside (θ ≡ 0) where all rays remain in phase. They exhibit their first null at θ ≅ ±λ/L. See Section 10.4 for more discussion of arrays of radiators. Acoustic array microphones have similar directional patterns, and microphones feeding parabolic reflectors of large dimension L have even higher gains, where the gain of an acoustic antenna is proportional to its effective area. The effective area of a parabolic reflector large compared to a wavelength is approximately its physical cross-section if it is uniformly illuminated without spillover, as shown in (11.1.25) for electromagnetic waves.