
4.1: Vector Arithmetic



- Last updated
- Apr 2, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In mathematical notation, a real-valued vector A is said to have a magnitude A=|A| and direction ˆa such that A=Aˆa where ˆa is a unit vector (i.e., a real-valued vector having magnitude equal to one) having the same direction as A. If a vector is complex-valued, then A is similarly complex-valued.
Cartesian Coordinate System
Fundamentals of vector arithmetic are most easily grasped using the Cartesian coordinate system. This system is shown in Figure 4.1.1. Note carefully the relative orientation of the x, y, and z axes. This orientation is important. For example, there are two directions that are perpendicular to the z=0 plane (in which the x- and y-axes lie), but the +z axis is specified to be one of these in particular.
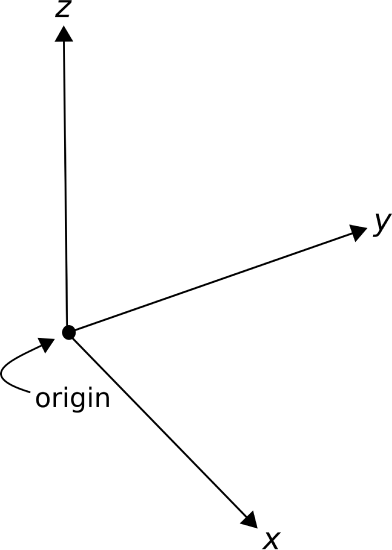 Figure 4.1.1: Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Figure 4.1.1: Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Position-Fixed vs. Position-Free Vectors
It is often convenient to describe a position in space as a vector for which the magnitude is the distance from the origin of the coordinate system and for which the direction is measured from the origin toward the position of interest. This is shown in Figure 4.1.2. These position vectors are “position-fixed” in the sense that they are defined with respect to a single point in space, which in this case is the origin. Position vectors can also be defined as vectors that are defined with respect to some other point in space, in which case they are considered position-fixed to that position.
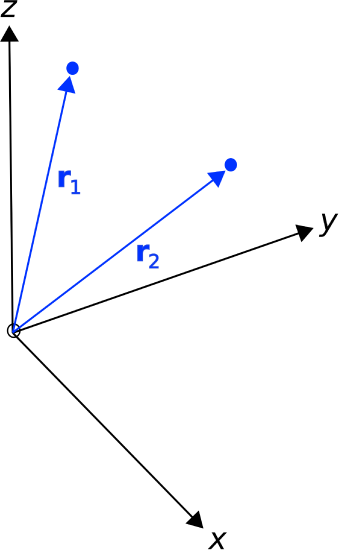 Figure 4.1.2: Position vectors. The vectors r1 and r2 are position-fixed and refer to particular locations. (CC BY SA 4.0; K. Kikkeri).
Figure 4.1.2: Position vectors. The vectors r1 and r2 are position-fixed and refer to particular locations. (CC BY SA 4.0; K. Kikkeri).
Position-free vectors, on the other hand, are not defined with respect to a particular point in space. An example is shown in Figure 4.1.2. Particles 1 m apart may both be traveling at 2 m/s in the same direction. In this case, the velocity of each particle can be described using the same vector, even though the particles are located at different points in space.
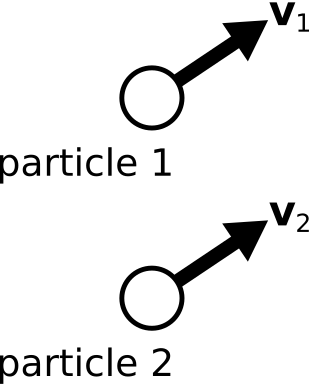 Figure 4.1.3: Two particles exhibiting the same velocity. In this case, the velocity vectors v1 and v2 are position-free and equal. (CC BY SA 4.0; K. Kikkeri).
Figure 4.1.3: Two particles exhibiting the same velocity. In this case, the velocity vectors v1 and v2 are position-free and equal. (CC BY SA 4.0; K. Kikkeri).
Position-free vectors are said to be equal if they have the same magnitudes and directions. Position-fixed vectors, on the other hand, must also be referenced to the same position (e.g., the origin) to be considered equal.
Basis Vectors
Each coordinate system is defined in terms of three basis vectors which concisely describe all possible ways to traverse three-dimensional space. A basis vector is a position-free unit vector that is perpendicular to all other basis vectors for that coordinate system. The basis vectors ˆx, ˆy, and ˆz of the Cartesian coordinate system are shown in Figure 4.1.4. In this notation, ˆx indicates the direction in which x increases most rapidly, ˆy indicates the direction in which y increases most rapidly, and ˆz indicates the direction in which z increases most rapidly. Alternatively, you might interpret ˆx, ˆy, and ˆz as unit vectors that are parallel to the x-, y-, and z-axes and point in the direction in which values along each axis increase.
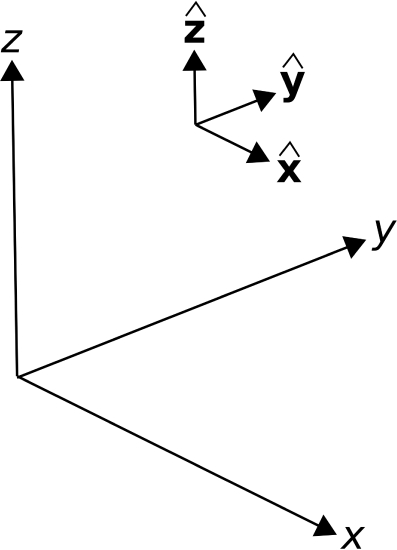 Figure 4.1.4: Basis vectors in the Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Figure 4.1.4: Basis vectors in the Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Vectors in the Cartesian Coordinate System
In Cartesian coordinates, we may describe any vector A as follows:
A=ˆxAx+ˆyAy+ˆzAz
where Ax, Ay, and Az are scalar quantities describing the components of A in each of the associated directions, as shown in Figure 4.1.5. This description makes it clear that the magnitude of A is:
|A|=√A2x+A2y+A2z and therefore, we can calculate the associated unit vector as
ˆa=A|A|=A√A2x+A2y+A2z= ˆxAx(A2x+A2y+A2z)−1/2 +ˆyAy(A2x+A2y+A2z)−1/2 +ˆzAz(A2x+A2y+A2z)−1/2
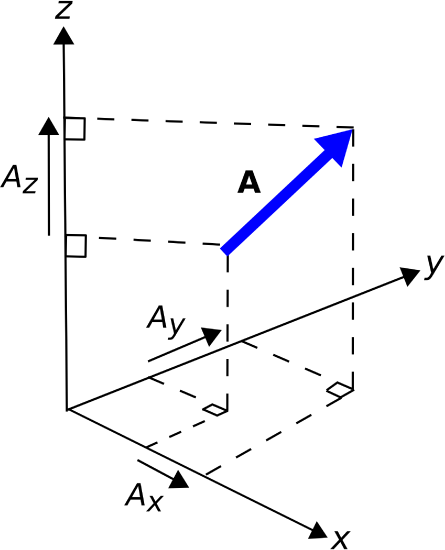 Figure 4.1.5: Components of a vector A in the Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Figure 4.1.5: Components of a vector A in the Cartesian coordinate system. (CC BY SA 4.0; K. Kikkeri).
Vector Addition and Subtraction
It is common to add and subtract vectors. For example, vectors describing two forces A and B applied to the same point can be described as a single force vector C that is the sum of A and B; i.e., C=A+B. This addition is quite simple in the Cartesian coordinate system:
C=A+B=(ˆxAx+ˆyAy+ˆzAz)+(ˆxBx+ˆyBy+ˆzBz)=ˆx(Ax+Bx)+ˆy(Ay+By)+ˆz(Az+Bz)
In other words, the ˆx component of C is the sum of the ˆx components of A and B, and similarly for ˆy and ˆz. From the above example, it is clear that vector addition is commutative; i.e.,
A+B=B+A
In other words, vectors may be added in any order. Vector subtraction is defined similarly:
D=A−B=(ˆxAx+ˆyAy+ˆzAz)−(ˆxBx+ˆyBy+ˆzBz)=ˆx(Ax−Bx)+ˆy(Ay−By)+ˆz(Az−Bz)
In other words, the ˆx component of D is the difference of the ˆx components of A and B, and similarly for ˆy and ˆz. Like scalar subtraction, vector subtraction is not commutative.
Relative Positions and Distances
A common task in vector analysis is to describe the position of one point in space relative to a different point in space. Let us identify those two points using the position vectors r1 and r2, as indicated in Figure 4.1.6. We may identify a third vector r12 as the position of r2 relative to r1: r12≜ Now \left|{\bf r}_{12}\right| is the distance between these points, and {\bf r}_{12}/\left|{\bf r}_{12}\right| is a unit vector indicating the direction to {\bf r}_{2} from {\bf r}_{1}.
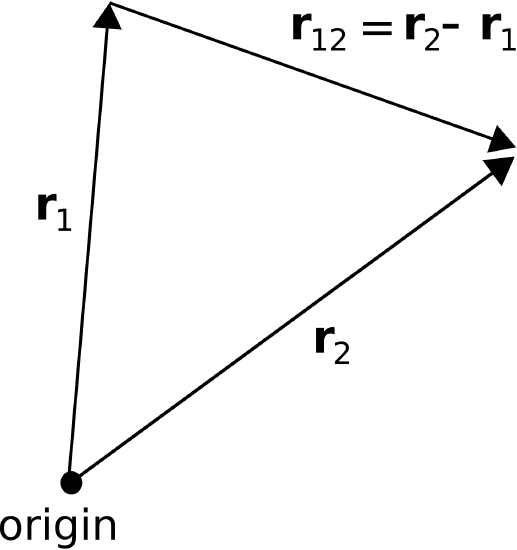 Figure \PageIndex{6}: Relative position (distance and direction) between locations identified by their position vector. (CC BY SA 4.0; K. Kikkeri).
Figure \PageIndex{6}: Relative position (distance and direction) between locations identified by their position vector. (CC BY SA 4.0; K. Kikkeri).
Consider two positions, identified using the position vectors {\bf r}_1 = 2\hat{\bf x} +3\hat{\bf y} +1\hat{\bf z} and {\bf r}_2 = 1\hat{\bf x} -2\hat{\bf y} +3\hat{\bf z}, both expressed in units of meters. Find the direction vector that points from {\bf r}_1 to {\bf r}_2, the distance between these points, and the associated unit vector.
Solution
The vector that points from {\bf r}_1 to {\bf r}_2 is
\begin{aligned} \mathbf { R } & = \mathbf { r } _ { 2 } - \mathbf { r } _ { 1 } \\[4pt] & = ( 1 - 2 ) \hat { \mathbf { x } } + ( - 2 - 3 ) \hat { \mathbf { y } } + ( 3 - 1 ) \hat { \mathbf { z } } \\[4pt] & = - \hat { \mathbf { x } } - 5 \hat { \mathbf { y } } + 2 \hat { \mathbf { z } } \end{aligned} \nonumber
The distance between {\bf r}_1 and {\bf r}_2 is simply the magnitude of this vector:
\left|{\bf R}\right| = \sqrt{ \left(-1\right)^2 + \left(-5\right)^2 + \left(2\right)^2 } \cong 5.48~\mbox{m} \nonumber
The unit vector \hat{\bf R} is simply {\bf R} normalized to have unit magnitude:
\begin{aligned} \hat { \mathbf { R } } & = \mathbf { R } / | \mathbf { R } | \\[4pt] & \cong ( - \hat { \mathbf { x } } - 5 \hat { \mathbf { y } } + 2 \hat { \mathbf { z } } ) / 5.48 \\[4pt] & \cong - 0.182 \hat { \mathbf { x } } - 0.913 \hat { \mathbf { y } } + 0.365 \hat { \mathbf { z } } \end{aligned} \nonumber
Multiplication of a Vector by a Scalar
Let’s say a particular force is specified by a vector {\bf F}. What is the new vector if this force is doubled? The answer is simply 2{\bf F} – that is, twice the magnitude applied in the same direction. This is an example of scalar multiplication of a vector. Generalizing, the product of the scalar \alpha and the vector {\bf A} is simply \alpha{\bf A}.
Scalar ("Dot") Product of Vectors
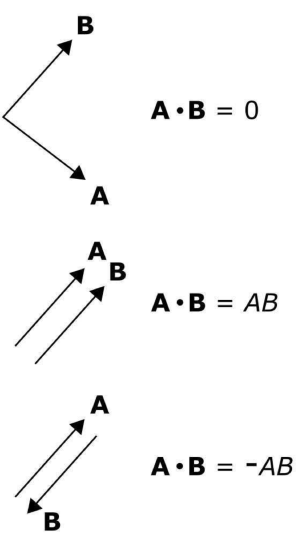 Figure \PageIndex{7}: Special cases of the dot product. (CC BY SA 4.0; K. Kikkeri).
Figure \PageIndex{7}: Special cases of the dot product. (CC BY SA 4.0; K. Kikkeri).
Another common task in vector analysis is to determine the similarity in the direction in which two vectors point. In particular, it is useful to have a metric which, when applied to the vectors {\bf A}=\hat{\bf a}A and {\bf B}=\hat{\bf b}B, has the following properties (Figure \PageIndex{7}):
- If {\bf A} is perpendicular to {\bf B}, the result is zero.
- If {\bf A} and {\bf B} point in the same direction, the result is AB.
- If {\bf A} and {\bf B} point in opposite directions, the result is -AB.
- Results intermediate to these conditions depend on the angle \psi between {\bf A} and {\bf B}, measured as if {\bf A} and {\bf B} were arranged “tail-to-tail” as shown in Figure \PageIndex{8}.
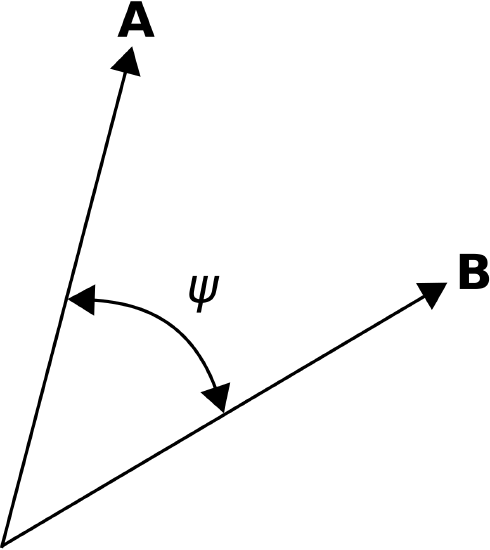 Figure \PageIndex{8}: Calculation of the dot product. (CC BY SA 4.0; K. Kikkeri).
Figure \PageIndex{8}: Calculation of the dot product. (CC BY SA 4.0; K. Kikkeri).
In vector analysis, this operator is known as the scalar product (not to be confused with scalar multiplication) or the dot product. The dot product is written {\bf A}\cdot{\bf B} and is given in general by the expression:
{\bf A}\cdot{\bf B} = AB\cos\psi \label{m0006_eDPdef}
Note that this expression yields the special cases previously identified, which are \psi=\pi/2, \psi=0, and \psi=\pi, respectively. The dot product is commutative; i.e., {\bf A}\cdot{\bf B} = {\bf B}\cdot{\bf A} \nonumber The dot product is also distributive; i.e.,
{\bf A}\cdot\left({\bf B}+{\bf C}\right) = {\bf A}\cdot{\bf B}+{\bf A}\cdot{\bf C} \nonumber
The dot product has some other useful properties. For example, note:
\begin{split} {\bf A}\cdot{\bf A} &= \left(\hat{\bf x}A_x + \hat{\bf y}A_y + \hat{\bf z}A_z\right) \cdot \left(\hat{\bf x}A_x + \hat{\bf y}A_y + \hat{\bf z}A_z\right) \\[4pt] &= ~~\hat{\bf x}\cdot\hat{\bf x} A_x^2 + \hat{\bf x}\cdot\hat{\bf y} A_x A_y + \hat{\bf x}\cdot\hat{\bf z} A_x A_z \\[4pt] &~~ +\hat{\bf y}\cdot\hat{\bf x} A_x A_y + \hat{\bf y}\cdot\hat{\bf y} A_y^2 + \hat{\bf y}\cdot\hat{\bf z} A_y A_z \\[4pt] &~~ +\hat{\bf z}\cdot\hat{\bf x} A_x A_z + \hat{\bf z}\cdot\hat{\bf y} A_y A_z + \hat{\bf z}\cdot\hat{\bf z} A_z^2 \end{split} \nonumber
which looks pretty bad until you realize that
\hat{\bf x}\cdot\hat{\bf x} = \hat{\bf y}\cdot\hat{\bf y} = \hat{\bf z}\cdot\hat{\bf z} = 1 \nonumber and any other dot product of basis vectors is zero. Thus, the whole mess simplifies to:
{\bf A}\cdot{\bf A} = A_x^2 + A_y^2 + A_z^2 \nonumber
This is the square of the magnitude of {\bf A}, so we have discovered that
{\bf A}\cdot{\bf A} = \left|{\bf A}\right|^2 = A^2 \nonumber Applying the same principles to the dot product of potentially different vectors {\bf A} and {\bf B}, we find:
\begin{align} {\bf A}\cdot{\bf B} &= \left(\hat{\bf x}A_x + \hat{\bf y}A_y + \hat{\bf z}A_z\right) \cdot \left(\hat{\bf x}B_x + \hat{\bf y}B_y + \hat{\bf z}B_z\right) \\[4pt] &= A_x B_x + A_y B_y + A_z B_z \label{m0006_eDPC} \end{align}
This is a particularly easy way to calculate the dot product, since it eliminates the problem of determining the angle \psi. In fact, an easy way to calculate \psi given {\bf A} and {\bf B} is to first calculate the dot product using Equation \ref{m0006_eDPC} and then use the result to solve Equation \ref{m0006_eDPdef} for \psi.
Consider the position vectors {\bf C} = 2\hat{\bf x} +3\hat{\bf y} +1\hat{\bf z} and {\bf D} = 3\hat{\bf x} -2\hat{\bf y} +2\hat{\bf z}, both expressed in units of meters. Find the angle between these vectors.
Solution
From Equation \ref{m0006_eDPdef}
{\bf C}\cdot{\bf D} = CD\cos\psi \nonumber
where C = \left|{\bf C}\right|, D = \left|{\bf D}\right|, and \psi is the angle we seek. From Equation \ref{m0006_eDPC}:
\begin{aligned} \mathbf { C } \cdot \mathbf { D } & = C _ { x } D _ { x } + C _ { y } D _ { y } + C _ { z } D _ { z } \\[4pt] & = 2 \cdot 3 + 3 \cdot ( - 2 ) + 1 \cdot 2 \mathrm { m } ^ { 2 } \\[4pt] & = 2 \: \mathrm { m } ^ { 2 } \end{aligned} \nonumber
also
\begin{aligned} C & = \sqrt { C _ { x } ^ { 2 } + C _ { y } ^ { 2 } + C _ { z } ^ { 2 } } \cong 3.742 \: \mathrm { m } \\[4pt] D & = \sqrt { D _ { x } ^ { 2 } + D _ { y } ^ { 2 } + D _ { z } ^ { 2 } } \cong 4.123 \: \mathrm { m } \end{aligned} \nonumber
so
\cos\psi = \frac{\bf C \cdot \bf D}{CD} \cong 0.130 \nonumber
Taking the inverse cosine, we find \psi=82.6^{\circ}.
Cross Product
The cross product is a form of vector multiplication that results in a vector that is perpendicular to both of the operands. The definition is as follows:
{\bf A}\times{\bf B} = \hat{\bf n}AB\sin\psi_{AB} \label{m0006_eCrossProduct}
As shown in Figure \PageIndex{9}, the unit vector \hat{\bf n} is determined by the “right hand rule.” Using your right hand, curl your fingers to traverse the angle \psi_{AB} beginning at {\bf A} and ending at {\bf B}, and then \hat{\bf n} points in the direction of your fully-extended thumb.
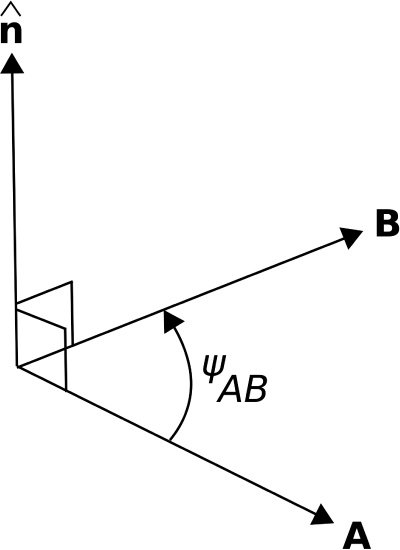 Figure \PageIndex{9}: The cross product \mathbf { A } \times \mathbf { B }. (CC BY SA 4.0; K. Kikkeri).
Figure \PageIndex{9}: The cross product \mathbf { A } \times \mathbf { B }. (CC BY SA 4.0; K. Kikkeri).
It should be apparent that the cross product is not commutative but rather is anticommutative; that is, {\bf A}\times{\bf B} = -{\bf B}\times{\bf A} \nonumber You can confirm this for yourself using either Equation \ref{m0006_eCrossProduct} or by applying the right-hand rule.
The cross product is distributive: {\bf A}\times\left({\bf B} + {\bf C}\right) = {\bf A}\times{\bf B} + {\bf A}\times{\bf C} \nonumber
There are two useful special cases of the cross product that are worth memorizing. The first is the cross product of a vector with itself, which is zero: {\bf A}\times{\bf A} = 0 \nonumber The second is the cross product of vectors that are perpendicular; i.e., for which \psi_{AB}=\pi/2. In this case:
{\bf A}\times{\bf B} = \hat{\bf n}AB \nonumber Using these principles, note: \hat{\bf x} \times \hat{\bf x} = \hat{\bf y} \times \hat{\bf y} = \hat{\bf z} \times \hat{\bf z} = 0 \nonumber
whereas
\hat{\bf x} \times \hat{\bf y} = \hat{\bf z} \nonumber
\hat{\bf y} \times \hat{\bf z} = \hat{\bf x} \nonumber
\hat{\bf z} \times \hat{\bf x} = \hat{\bf y} \nonumber
A useful diagram that summarizes these relationships is shown in Figure \PageIndex{10}.
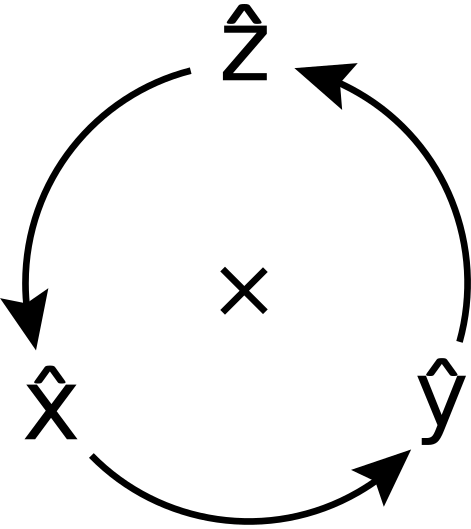 Figure \PageIndex{10}: Cross products among basis vectors in the Cartesian system. The cross product of any two basis vectors is the third basis vector when the order of operands is counter-clockwise, as shown in the diagram, and is −1 times the third basis vector when the order of operands is clockwise with respect to the arrangement in the diagram. (CC BY SA 4.0; K. Kikkeri).
Figure \PageIndex{10}: Cross products among basis vectors in the Cartesian system. The cross product of any two basis vectors is the third basis vector when the order of operands is counter-clockwise, as shown in the diagram, and is −1 times the third basis vector when the order of operands is clockwise with respect to the arrangement in the diagram. (CC BY SA 4.0; K. Kikkeri).
It is typically awkward to “manually” determine \hat{\bf n} in Equation \ref{m0006_eCrossProduct}. However, in Cartesian coordinates the cross product may be calculated as:
\begin{split} {\bf A}\times{\bf B} =& ~~~~\hat{\bf x}\left(A_y B_z - A_z B_y \right) \\[4pt] & +\hat{\bf y}\left(A_z B_x - A_x B_z \right) \\[4pt] & +\hat{\bf z}\left(A_x B_y - A_y B_x \right) \end{split} \nonumber
This may be easier to remember as a matrix determinant:
{\bf A}\times{\bf B} = \begin{vmatrix} \hat{\bf x} & \hat{\bf y} & \hat{\bf z} \\[4pt] A_x & A_y & A_z \\[4pt] B_x & B_y & B_z \end{vmatrix} \nonumber
Similar expressions are available for other coordinate systems.
Vector analysis routinely requires expressions involving both dot products and cross products in different combinations. Often, these expressions may be simplified, or otherwise made more convenient, using the vector identities listed in Appendix B3.