
7.5: Magnetic Field of an Infinitely-Long Straight Current-Bearing Wire




( \newcommand{\kernel}{\mathrm{null}\,}\)
In this section, we use the magnetostatic form of Ampere’s Circuital Law (ACL) to determine the magnetic field due to a steady current I (units of A) in an infinitely-long straight wire. The problem is illustrated in Figure 7.5.1. The wire is an electrically-conducting circular cylinder of radius a. Since the wire is a cylinder, the problem is easiest to work in cylindrical coordinates with the wire aligned along the z axis.
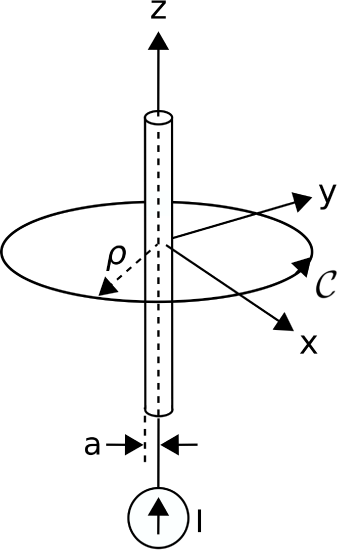 Figure 7.5.1: Determination of the magnetic field due to steady current in an infinitely-long straight wire. (CC BY SA 4.0; K. Kikkeri).
Figure 7.5.1: Determination of the magnetic field due to steady current in an infinitely-long straight wire. (CC BY SA 4.0; K. Kikkeri).
Here’s the relevant form of ACL:
∮CH⋅dl=Iencl
where Iencl is the current enclosed by the closed path C. ACL works for any closed path, so to exploit the symmetry of the cylindrical coordinate system we choose a circular path of radius ρ in the z=0 plane, centered at the origin. With this choice we have
Iencl=I for ρ≥a
For ρ<a, we see that Iencl<I. a steady (DC) current will be distributed uniformly throughout the wire (Section 6.4). Since the current is uniformly distributed over the cross section, Iencl is less than the total current I by the same factor that the area enclosed by C is less than πa2, the cross-sectional area of the wire. The area enclosed by C is simply πρ2, so we have
Iencl=Iπρ2πa2=Iρ2a2 for ρ<a
For the choice of C made above, Equation ??? becomes
∫2πϕ=0H⋅(ˆϕ ρ dϕ)=Iencl
Note that we have chosen to integrate in the +ϕ direction. Therefore, the right-hand rule specifies that positive Iencl corresponds to current flowing in the +z direction, which is consistent with the direction indicated in Figure 7.5.1. (Here’s an excellent exercise to test your understanding. Change the direction of the path of integration and confirm that you get the same result obtained at the end of this section. Changing the direction of integration should not change the magnetic field associated with the current!)
The simplest way to solve for H from Equation ??? is to use a symmetry argument, which proceeds as follows:
- Since the distribution of current is uniform and infinite in the z-dimension, H can’t depend on z, and so H⋅ˆz must be zero everywhere.
- The problem is identical after any amount of rotation in ϕ; therefore, the magnitude of H cannot depend on ϕ. This is a form of radial symmetry. Since we determined above that H can’t depend on z either, it must be that the magnitude of H can depend only on ρ.
- The radial symmetry of the problem also requires that H⋅ˆρ be equal to zero. If this were not the case, then the field would not be radially symmetric. Since we determined above that H⋅ˆz is also zero, H must be entirely ±ˆϕ-directed.
From the above considerations, the most general form of the magnetic field intensity can be written H=ˆϕH(ρ). Substituting this into Equation ???, we obtain
Iencl=∫2πϕ=0[ˆϕH(ρ)]⋅(ˆϕρdϕ)=ρH(ρ)∫2πϕ=0dρ=2πρH(ρ)
Therefore, H(ρ)=Iencl/2πρ. Reassociating the known direction, we obtain:
H=ˆϕIencl2πρ
Therefore, the field outside of the wire is:
H=ˆϕI2πρ for ρ≥a
whereas the field inside the wire is:
H=ˆϕIρ2πa2 for ρ<a
(By the way, this is a good time for a units check.)
Note that as ρ increases from zero to a (i.e., inside the wire), the magnetic field is proportional to ρ and therefore increases. However, as ρ continues to increase beyond a (i.e., outside the wire), the magnetic field is proportional to ρ−1 and therefore decreases.
If desired, the associated magnetic flux density can be obtained using B=μH.
Summarizing
The magnetic field due to current in an infinite straight wire is given by Equations [m0119_eACLLCe] (outside the wire) and [m0119_eACLLCi] (inside the wire). The magnetic field is +ˆϕ-directed for current flowing in the +z direction, so the magnetic field lines form concentric circles perpendicular to and centered on the wire.
Finally, we point out another “right-hand rule” that emerges from this solution, shown in Figure 7.5.2 and summarized below:
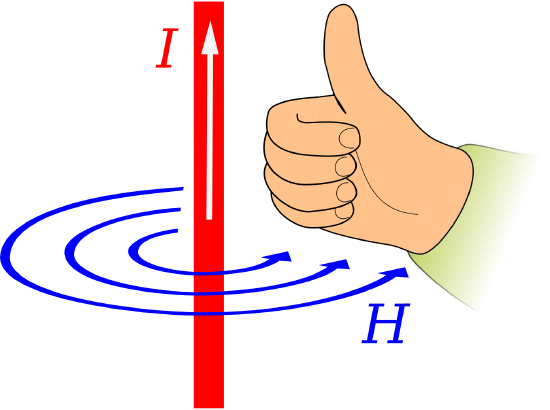 Figure 7.5.2: Right-hand rule for the relationship between the direction of current and the direction of the magnetic field. (CC BY SA 4.0 (modified); Jfmelero).
Figure 7.5.2: Right-hand rule for the relationship between the direction of current and the direction of the magnetic field. (CC BY SA 4.0 (modified); Jfmelero).
The magnetic field due to current in an infinite straight wire points in the direction of the curled fingers of the right hand when the thumb of the right hand is aligned in the direction of current flow.
This simple rule turns out to be handy in quickly determining the relationship between the directions of the magnetic field and current flow in many other problems, and so is well worth committing to memory.