
13.7: Electric Generators and Back Emf


- Last updated
- Mar 3, 2025
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
By the end of this section, you will be able to:
- Explain how an electric generator works
- Determine the induced emf in a loop at any time interval, rotating at a constant rate in a magnetic field
- Show that rotating coils have an induced emf; in motors this is called back emf because it opposes the emf input to the motor
A variety of important phenomena and devices can be understood with Faraday’s law. In this section, we examine two of these.
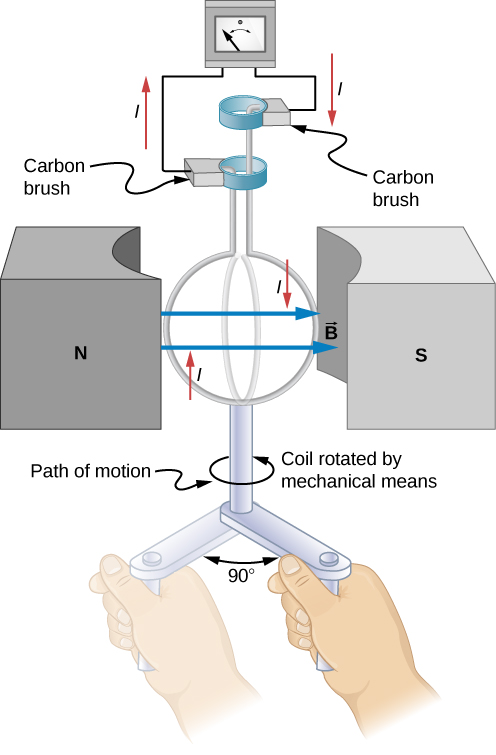
Electric Generators
Electric generators induce an emf by rotating a coil in a magnetic field, as briefly discussed in Motional Emf. We now explore generators in more detail. Consider the following example.
The generator coil shown in Figure 13.7.1 is rotated through one-fourth of a revolution (from θ=0o to θ=90o) in 15.0 ms. The 200-turn circular coil has a 5.00-cm radius and is in a uniform 0.80-T magnetic field. What is the emf induced?
Strategy
Faraday’s law of induction is used to find the emf induced:
ϵ=−NdΦmdt.
We recognize this situation as the same one in Example 13.4.3. According to the diagram, the projection of the surface normal vector ˆn to the magnetic field is initially cosθ and this is inserted by the definition of the dot product. The magnitude of the magnetic field and area of the loop are fixed over time, which makes the integration simplify quickly. The induced emf is written out using Faraday’s law:
ϵ=NBAsinθdθdt.
Solution We are given that N=200, B=0.80T, θ=90o, dθ=90o=π/2, and dt=15.0ms. The area of the loop is
A=πr2=(3.14)(0.0500m)2=7.85×10−3m2.
Entering this value gives
ϵ=(200)(0.80T)(7.85×10−3m2)sin(90o)π/215.0×10−3s=131V.
Significance
This is a practical average value, similar to the 120 V used in household power.
The emf calculated in Example 13.7.1 is the average over one-fourth of a revolution. What is the emf at any given instant? It varies with the angle between the magnetic field and a perpendicular to the coil. We can get an expression for emf as a function of time by considering the motional emf on a rotating rectangular coil of width w and height l in a uniform magnetic field, as illustrated in Figure 13.7.2.
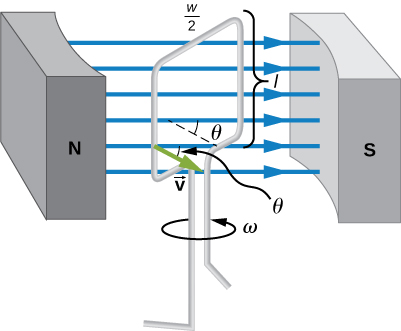
Charges in the wires of the loop experience the magnetic force, because they are moving in a magnetic field. Charges in the vertical wires experience forces parallel to the wire, causing currents. But those in the top and bottom segments feel a force perpendicular to the wire, which does not cause a current. We can thus find the induced emf by considering only the side wires. Motional emf is given to be ϵ=Blv, where the velocity v is perpendicular to the magnetic field B. Here the velocity is at an angle θ with B, so that its component perpendicular to B is v sin θ (see Figure 13.7.2). Thus, in this case, the emf induced on each side is ϵ=Blvsinθ and they are in the same direction. The total emf around the loop is then
ϵ=2Blvsinθ.
This expression is valid, but it does not give emf as a function of time. To find the time dependence of emf, we assume the coil rotates at a constant angular velocity ω. The angle θ is related to angular velocity by θ=ωt, so that ϵ=2Blvsin(ωt).
Now, linear velocity v is related to angular velocity ω by v=rω. Here, r=ω/2, so that v=(ω/2)ω, and
ϵ=2Blω2ωsinωt=(lω)Bwsinωt.
Noting that the area of the loop is A=lω, and allowing for N loops, we find that
ϵ=NBAwsin(ωt).
This is the emf induced in a generator coil of N turns and area A rotating at a constant angular velocity ω in a uniform magnetic field B. This can also be expressed as
ϵ=ϵ0sinωt, where
ϵ0=NABω
is the peak emf, since the maximum value of sin(ωt)=1. Note that the frequency of the oscillation is f=ω/2π and the period is T=1/f=2π/ω. Figure 13.7.3 shows a graph of emf as a function of time, and it now seems reasonable that ac voltage is sinusoidal.
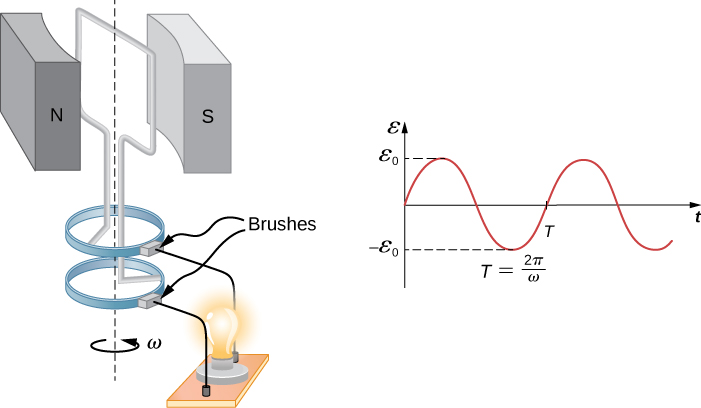
The fact that the peak emf is ϵ0=NBAω makes good sense. The greater the number of coils, the larger their area, and the stronger the field, the greater the output voltage. It is interesting that the faster the generator is spun (greater ω), the greater the emf. This is noticeable on bicycle generators—at least the cheaper varieties.
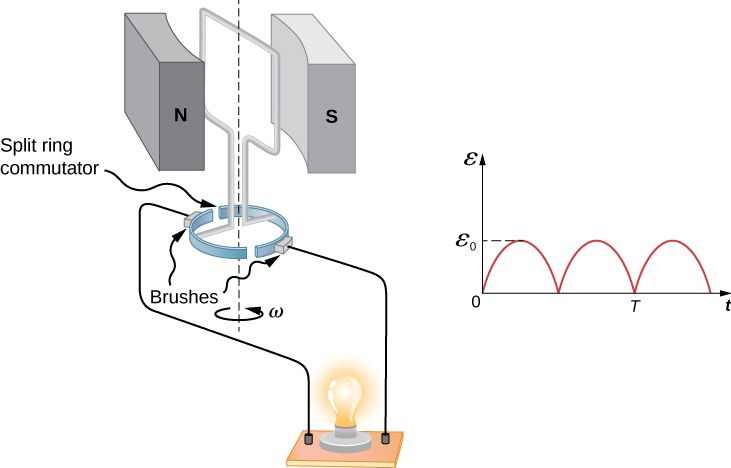
Figure 13.7.4 shows a scheme by which a generator can be made to produce pulsed dc. More elaborate arrangements of multiple coils and split rings can produce smoother dc, although electronic rather than mechanical means are usually used to make ripple-free dc.
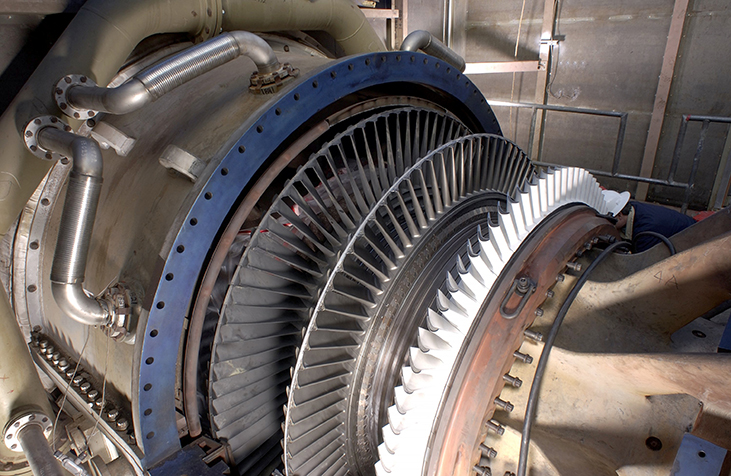
In real life, electric generators look a lot different from the figures in this section, but the principles are the same. The source of mechanical energy that turns the coil can be falling water (hydropower), steam produced by the burning of fossil fuels, or the kinetic energy of wind. Figure 13.7.5 shows a cutaway view of a steam turbine; steam moves over the blades connected to the shaft, which rotates the coil within the generator. The generation of electrical energy from mechanical energy is the basic principle of all power that is sent through our electrical grids to our homes.
Generators illustrated in this section look very much like the motors illustrated previously. This is not coincidental. In fact, a motor becomes a generator when its shaft rotates. Certain early automobiles used their starter motor as a generator. In the next section, we further explore the action of a motor as a generator.
Back Emf
Generators convert mechanical energy into electrical energy, whereas motors convert electrical energy into mechanical energy. Thus, it is not surprising that motors and generators have the same general construction. A motor works by sending a current through a loop of wire located in a magnetic field. As a result, the magnetic field exerts torque on the loop. This rotates a shaft, thereby extracting mechanical work out of the electrical current sent in initially. (Refer to Force and Torque on a Current Loop for a discussion on motors that will help you understand more about them before proceeding.)
When the coil of a motor is turned, magnetic flux changes through the coil, and an emf (consistent with Faraday’s law) is induced. The motor thus acts as a generator whenever its coil rotates. This happens whether the shaft is turned by an external input, like a belt drive, or by the action of the motor itself. That is, when a motor is doing work and its shaft is turning, an emf is generated. Lenz’s law tells us the emf opposes any change, so that the input emf that powers the motor is opposed by the motor’s self-generated emf, called the back emf of the motor (Figure 13.7.6).
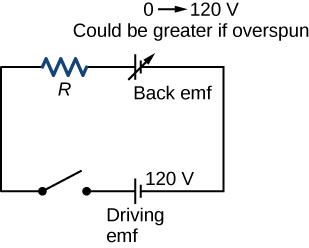
The generator output of a motor is the difference between the supply voltage and the back emf. The back emf is zero when the motor is first turned on, meaning that the coil receives the full driving voltage and the motor draws maximum current when it is on but not turning. As the motor turns faster, the back emf grows, always opposing the driving emf, and reduces both the voltage across the coil and the amount of current it draws. This effect is noticeable in many common situations. When a vacuum cleaner, refrigerator, or washing machine is first turned on, lights in the same circuit dim briefly due to the IR drop produced in feeder lines by the large current drawn by the motor.
When a motor first comes on, it draws more current than when it runs at its normal operating speed. When a mechanical load is placed on the motor, like an electric wheelchair going up a hill, the motor slows, the back emf drops, more current flows, and more work can be done. If the motor runs at too low a speed, the larger current can overheat it (via resistive power in the coil, P=I2R), perhaps even burning it out. On the other hand, if there is no mechanical load on the motor, it increases its angular velocity ω until the back emf is nearly equal to the driving emf. Then the motor uses only enough energy to overcome friction.
Eddy currents in iron cores of motors can cause troublesome energy losses. These are usually minimized by constructing the cores out of thin, electrically insulated sheets of iron. The magnetic properties of the core are hardly affected by the lamination of the insulating sheet, while the resistive heating is reduced considerably. Consider, for example, the motor coils represented in Figure 13.7.6. The coils have an equivalent resistance of 0.400Ω and are driven by an emf of 48.0 V. Shortly after being turned on, they draw a current
I=V/R=(48.0V)/(0.400Ω)=120A
and thus dissipate P=I2R=5.76kW of energy as heat transfer. Under normal operating conditions for this motor, suppose the back emf is 40.0 V. Then at operating speed, the total voltage across the coils is 8.0 V (48.0 V minus the 40.0 V back emf), and the current drawn is
I=V/R=(8.0V)/(0.400Ω)=20A.
Under normal load, then, the power dissipated is P=IV=(20A)(8.0V)=160W. This does not cause a problem for this motor, whereas the former 5.76 kW would burn out the coils if sustained.
The total resistance (Rf+Ra) of a series-wound dc motor is 2.0Ω (Figure 13.7.7). When connected to a 120-V source (ϵS), the motor draws 10 A while running at constant angular velocity. (a) What is the back emf induced in the rotating coil, ϵi? (b) What is the mechanical power output of the motor? (c) How much power is dissipated in the resistance of the coils? (d) What is the power output of the 120-V source? (e) Suppose the load on the motor increases, causing it to slow down to the point where it draws 20 A. Answer parts (a) through (d) for this situation.
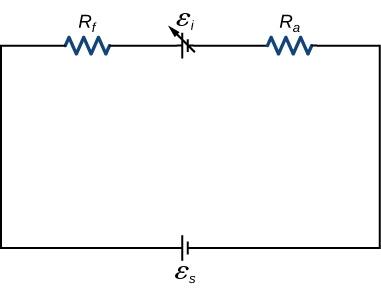
Strategy
The back emf is calculated based on the difference between the supplied voltage and the loss from the current through the resistance. The power from each device is calculated from one of the power formulas based on the given information.
Solution
- The back emf is ϵi=ϵS−I(Rf+REa)=120V−(10A)(2.0Ω)=100V.
- Since the potential across the armature is 100 V when the current through it is 10 A, the power output of the motor is Pm=ϵiI=(100V)(10A)=1.0×103W.
- A 10-A current flows through coils whose combined resistance is 2.0Ω, so the power dissipated in the coils is PR=I2R=(10A)2(2.0Ω)=2.0×102W.
- Since 10 A is drawn from the 120-V source, its power output is PS=ϵSI=(120V)(10A)=1.2×103W.
- Repeating the same calculations with I=20A, we find ϵi=80V,Pm=1.6×103W,PR=8.0×102W,andPs=2.4×103W. The motor is turning more slowly in this case, so its power output and the power of the source are larger.
Significance Notice that we have an energy balance in part (d): 1.2×103W=1.0×103W+2.0×102W.