
3.1: More than One Degree of Freedom




- Last updated
- Aug 2, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In general, the number of degrees of freedom of a system is the number of independent coordinates required to specify the system’s configuration. The more degrees of freedom the system has, the larger the number of independent ways that the system can move. The more possible motions, you might think, the more complicated the system will be to analyze. In fact, however, using the tools of linear algebra, we will see that we can deal with systems with many degrees of freedom in a straightforward way.
Coupled Oscillators
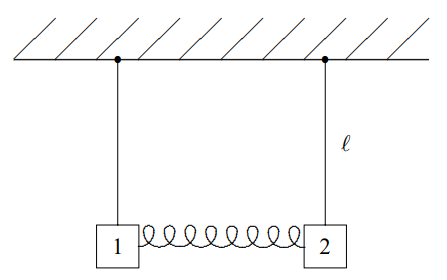
Figure 3.1: Two pendulums coupled by a spring.
Consider the system of two pendulums shown in Figure 3.1. The pendulums consist of rigid rods pivoted at the top so they oscillate without friction in the plane of the paper. The masses at the ends of the rods are coupled by a spring. We will consider the free motion of the system, with no external forces other than gravity. This is a classic example of two “coupled oscillators.” The spring that connects the two oscillators is the coupling. We will assume that the spring in Figure 3.1 is unstretched when the two pendulums are hanging straight down, as shown. Then the equilibrium configuration is that shown in Figure 3.1. This is an example of a system with two degrees of freedom, because two quantities, the displacements of each of the two blocks from equilibrium, are required to specify the configuration of the system. For example, if the oscillations are small, we can specify the configuration by giving the horizontal displacement of each of the two blocks from the equilibrium position.
Suppose that block 1 has mass m1, block 2 has mass m2, both pendulums have length ℓ and the spring constant is κ (Greek letter kappa). Label the (small) horizontal displacements of the blocks to the right, x1 and x2, as shown in Figure 3.2. We could have called these
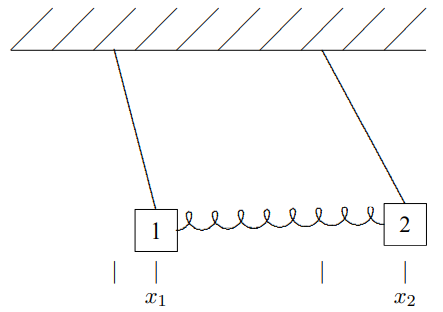
Figure 3.2: Two pendulums coupled by a spring displaced from their equilibrium positions.
masses and displacements anything, but it is very convenient to use the same symbol, x, with different subscripts. We can then write Newton’s law, F=ma, in a compact and useful form. mjd2dt2xj=Fj,
for j = 1 to 2, where F1 is the horizontal force on block 1 and F2 is the horizontal force on block 2. Because there are two values of j, (3.1) is two equations; one for j = 1 and another for j = 2. These are the two equations of motion for the system with two degrees of freedom. We will often refer to all the masses, displacements or forces at once as mj, xj or Fj, respectively. For example, we will say that Fj is the horizontal force on the jth block. This is an example of the use of “indices” (j is an index) to simplify the description of a system with more than one degree of freedom.
When the blocks move horizontally, they will move vertically as well, because the length of the pendulums remains fixed. Because the vertical displacement is second order in the xjs, yj≈x2j2,
we can ignore it in thinking about the spring. The spring stays approximately horizontal for small oscillations.
To find the equation of motion for this system, we must find the forces, Fj, in terms of the displacements, xj. It is the approximate linearity of the system that allows us to do this in a useful way. The forces produced by the Hooke’s law spring, and the horizontal forces on the pendulums due to the tension in the string (which in turn is due to gravity) are both approximately linear functions of the displacements for small displacements. Furthermore, the forces vanish when both the displacements vanish, because the system is in equilibrium. Thus each of the forces is some constant (different for each block) times x1 plus some other constant times x2. It is convenient to write this as follows: F1=−K11x1−K12x2,F2=−K21x1−K22x2,
or more compactly, Fj=−2∑k=1Kjkxk
for j = 1 to 2. We have written the four constants as K11, K12, K21 and K22 in order to write the force in this compact way. Later, we will call these constants the matrix elements of the K matrix. In this notation, the equations of motion are mjd2dt2xj=−2∑k=1Kjkxk
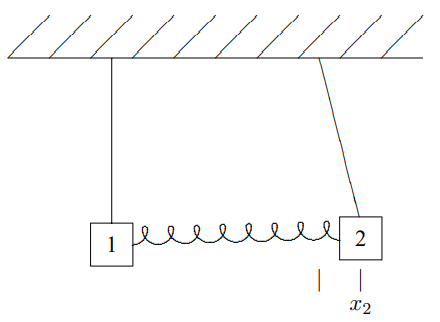
Figure 3.3: Two pendulums coupled by a spring with block 2 displaced from an equilibrium position.
Because of the linearity of the system, we can find the constants, Kjk, by considering the displacements of the blocks one at a time. Then we find the total force using (3.4). For example, suppose we displace block 2 with block 1 held fixed in its equilibrium position and look at the forces on both blocks. This will allow us to compute K12 and K22. The system with block two displaced is shown in Figure 3.3. The forces on the blocks are shown in Figure 3.4, where Tj is the tension in the jth pendulum string. F12 is the force on block 1 due to the displacement of block 2. F22 is the force on block 2 due to the displacement of block 2. For small displacements, the restoring force from the spring is nearly horizontal and equal to κx2 on block 1 and −κx2 on block 2. Likewise, in the limit of small displacement, the vertical component of the force from the tension T2 nearly cancels the gravitational force on block 2, m2g, so that the horizontal component of the tension gives a restoring force −x2m2g/ℓ on block 2. For block 1, the force from the tension T1 just cancels the gravitational force m1g. Thus F12≈κx2,F22≈−m2gx2ℓ−κx2,
and K12≈−κ,K22≈m2gℓ+κ.
An analogous argument shows that K21≈−κ,K11≈m1gℓ+κ.
Notice that K12=K21.
We will see below that this is an example of a very general relation.
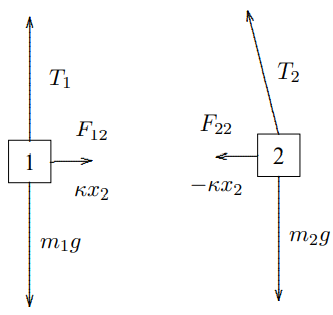
Figure 3.4: The forces on the two blocks in Figure 3.3.
Linearity and Normal Modes
 3-1
3-1
We will see in this chapter that the most general possible motion of this system, and of any such system of oscillators, can be decomposed into particularly simple solutions, in which all the degrees of freedom oscillate with the same frequency. These simple solutions are called “normal modes.” The displacements for the most general motion can be written as sums of the simple solutions. We will study how this works in detail later, but it may be useful to see it first. A possible motion of the system of two coupled oscillators is animated in program 3-1. Below the actual motion, we show the two simple motions into which the more complicated motion can be decomposed. For this system, the normal mode with the lower frequency is one in which the displacements of the two blocks are the same: x1(t)=x2(t)=b1cos(ω1t−θ1).
The other normal mode is one in which the displacements of the two blocks are opposite x1(t)=−x2(t)=b2cos(ω2t−θ2).
The sum of these two simple motions gives the much more complicated motion shown in program 3-1.
n Coupled Oscillators
Before we try to solve the equations of motion, (3.5), let us generalize the discussion to systems with more degrees of freedom. Consider the oscillation of a system of n particles connected by various springs with no damping. Our analysis will be completely general, but for simplicity, we will talk about the particles as if they are constrained to move in the x direction, so that we can measure the displacement of the jth particle from equilibrium with the coordinate xj. Then the equilibrium configuration is the one in which all the xjs are all zero.
Newton’s law, F=ma, for the motion of the system gives mjd2xjdt2=Fj
where mj is the mass of the jth particle, Fj is the force on it. Because the system is linear, we expect that we can write the force as follows (as in (3.4)): Fj=−n∑k=1Kjkxk
for j=1 to n. The constant, −Kjk, is the force per unit displacement of the jth particle due to a displacement xk of the kth particle. Note that all the Fjs vanish at equilibrium when all the xjs are zero. Thus the equations of motion are mjd2xjdt2=−∑kKjkxk
for j=1 to n.
To measure Kjk, make a small displacement, xk, of the kth particle, keeping all the other particles fixed at zero, assumed to be an equilibrium position. Then measure the force, Fjk on the jth particle with only the kth particle displaced. Since the system is linear (because it is made out of springs or in general, as long as the displacement is small enough), the force is proportional to the displacement, xk. The ratio of Fjk to xk is −Kjk: Kjk=−Fjk/xk when xℓ=0 for ℓ≠k.
Note that Kjk is defined with a − sign, so that a positive K is a force that is opposite to the displacement, and therefore tends to return the system to equilibrium.
Because the system is linear, the total force due to an arbitrary displacement is the sum of the contributions from each displacement. Thus Fj=∑kFjk=−∑kKjkxk
Let us now try to understand (3.9). If we consider systems with no damping, the forces can be derived from a potential energy, Fj=−∂V∂xj.
But then by differentiating equation (3.16) we find that Kjk=∂2V∂xj∂xk.
The partial differentiations commute with one another, thus equation (3.18) implies Kjk=Kkj.
In words, the force on particle j due to a displacement of particle k is equal to the force on particle k due to the displacement of particle j.