
13.2.1: Anatomy of an Oscillation




- Last updated
- Aug 30, 2024
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Anatomy of an Oscillation
At time = 0 seconds, the block is released at x = A. It has zero velocity, maximum acceleration and maximum displacement. The spring is at maximum stretch length. As the spring pulls the block towards x = 0, the block's velocity starts to increase. As the spring contracts, the spring force decreases so the acceleration decreases. But, even though the acceleration is decreasing, the block's velocity is still increasing. At some later time, the block has reached x = 0. The spring force becomes zero, so the acceleration becomes zero. The block reaches maximum speed, traveling to the left.
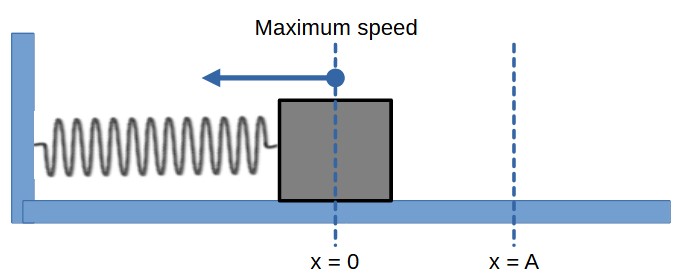
Mass-spring system (maximum speed), by Claude Mona, under CC BY NC
As the block crosses the equilibrium position moving to the left, it starts to compress the spring. The spring force now acts to the right, meaning the acceleration is in the opposite direction that the block is traveling. This causes the block to slow down as it keeps moving to the left.
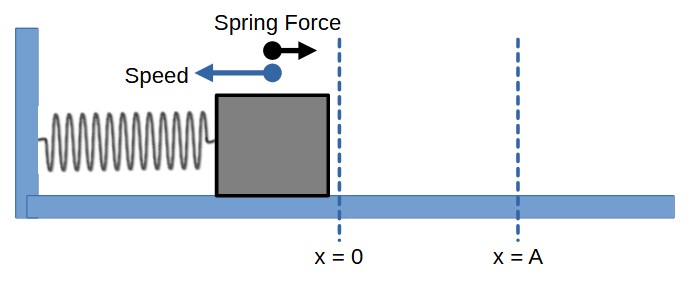
Mass-spring system (slowing down), by Claude Mona, under CC BY NC
Eventually the block stops moving. This happens at position x = -A. At this instant the block is half-way through the cycle, so t = 12T. It experiences a maximum spring force to the right, which means maximum acceleration to the right. Now the block starts moving to the right, speeding up as the spring force and acceleration decrease. It returns to x = 0, moving with maximum speed, still moving to the right.
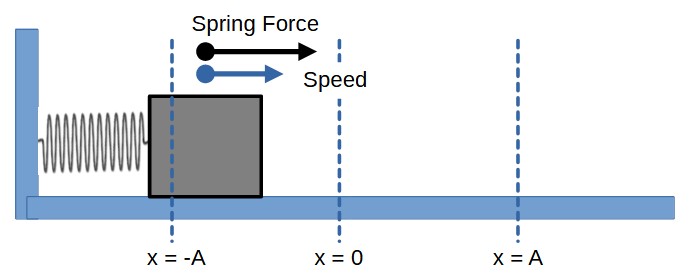
Mass-spring system (reversing direction), by Claude Mona, under CC BY NC
From x = 0 to x = A, the block slows down, because the spring force is to the left and the block is still moving to the right. The block momentarily stops moving when it reaches x = A. This completes one cycle. The block has returned to the same location it started from, T seconds after it was initially released.