
21.2: Inclined Block and Vertical Block




- Last updated
- Aug 8, 2024
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
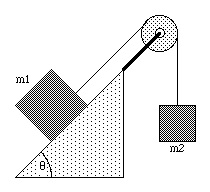
Now let's generalize the previous problem by placing block m1 on an upward inclined plane that makes an angle θ to the horizontal (Figure 21.2.1). We'll begin with the case where the inclined plane is frictionless. The forces on mass m1 are the upward tension T as before, plus a downward acceleration m1gsinθ down the inclined plane.
Taking upslope as positive and downslope as negative, Newton's second law for m1 is then
ΣiFi=m1a⇒T−m1gsinθ=m1a
Newton's second law for m2, in the vertical (downward) direction, is the same as before:
ΣiFi=m2a⇒m2g−T=m2a
As before, we add these two equations to eliminate the tension T and solve for the acceleration a. We find
a=m2−m1sinθm1+m2g
and then solving for the tension T, we find
T=m1m2(1+sinθ)m1+m2g
Notice that these equations reduce to the equations for m1 on a horizontal surface (Section 18.1) when we set θ=0, as expected.
Note particularly how we chose the signs in this problem. When the system is released, the vertical block will fall downward; we'll choose to call this the positive (+a) direction. Since this will result in the block on the plane accelerating upslope, this means we must choose upslope to be the positive direction to keep the signs consistent.
Now let's generalize this even further by adding friction to the inclined plane. In this case, mass m1 will experience an upslope force equal to the tension T and a downslope force m1gsinθ. In addition, there will be a frictional force f=μn=μm1gcosθ acting opposite the direction of motion (downslope). Thus
ΣiFi=m1a⇒T−m1gsinθ−μm1gcosθ=m1a
Newton's second law for m2, in the vertical (downward) direction, is the same as before:
ΣiFi=m2a⇒m2g−T=m2a
As before, we add these two equations to eliminate the tension T and solve for the acceleration a :
a=m2−m1(μcosθ+sinθ)m1+m2g
and we find the tension to be
T=m1m2(1+μcosθ+sinθ)m1+m2g
The last two equations are generalizations of all the previous problems. Setting θ=0 recovers the equations for m1 on a horizontal surface, and setting μ=0 recovers the frictionless formulas. Furthermore, setting μ=0 and θ=90∘ produces the equations for the acceleration and tension for the Atwood's machine discussed in Chapter 18.