
2.2 Force
- Page ID
- 2848
This page is a draft and is under active development.

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We can apply the Energy-Interaction Model used in Chapter 1 to mechanical energy-systems as well as to thermal and bond energy-systems. Mechanical interactions obey the same rules and can be understood in the same way as the interactions we studied in Chapter 1. Because energy conservation still holds, regardless of the kind of interaction, energy-system diagrams prove to be just as useful in describing the interactions that take place as a ball falls as in describing the interactions taking place in a pot of boiling water. We will also be able to make numerical predictions of various parameters in mechanical interactions, just as we were able to do for thermal interactions.
If temperature and heat are the gateways into thermal energy interactions, work and force are the gateways into mechanical energy interactions.
With thermal and bond systems, we could infer changes in the energy of a system through changes in observable properties, the indicators, such as temperature for the change of thermal energies and change of mass in phase changes. In the mechanical systems introduced below, we infer changes in energy by looking at changes in position and speed. The mechanical energy-systems we describe can exchange energy with each other or with the thermal and bond systems that we discussed in Chapter 1. In Chapter 1, we labeled the energy transferred into a physical system due to a difference in temperature between two objects as heat. In this chapter, we introduce another type of energy transfer to a physical system, which is given the label work, W.
Introduction to Force and Work
Before discussing work explicitly, we will also introduce some ideas about force. These are ideas that we will come back to thoroughly in Part 2 of the course. For right now, we just need a few fairly simple ideas related to force. We can simply think of them as sub-constructs that we will use to make sure we are all on at least a 10th grade level of understanding of work and force and using the same vocabulary. This is all we need for now.
Force
To get thinking about force, here are a few prototypical examples of forces:
A Contact Force
In order to open a door, you exert a contact force with your hand.
A Friction Force
After sliding for a while, a hockey puck is eventually brought to rest due to friction forces.
A Tension Force
A rope applies a force to two tug-of-war players, pulling them inwards towards each other.
From here you already have a pretty good idea of what a force is. In loose terms,
A force is any push or pull between two objects.
Forces have both a magnitude and a direction associated with them. We are all familiar with these ideas. Pushes and pulls have a magnitude (how hard is the push) and in what direction is the push. The technical term used to indicate that a concept has both of these properties is to say it has a vector nature or simply to say it is a vector. We won’t dwell on this in Part 1 of the course or in discussion/lab activities for right now. Both parts, direction and magnitude, do, however, affect the amount of energy that one physical system transfers to another physical system. So we need to explore these ideas a little bit further.
One way to represent vector quantities is to simply draw an arrow pointing in the direction the force points (think of the direction of a pull or push) and let the length of the arrow represent the magnitude of the force (how hard the push is pushing). Shown below are several forces represented in this way with arrows.
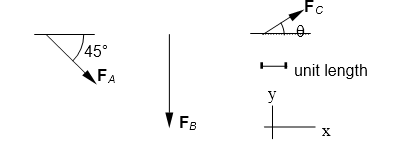
In these examples, force FA is almost three units in magnitude and points in a direction 45˚ below the +x axis, or we could say it points southeast. Force FB is about four units in magnitude and points in the –y direction, or south. Force FC is about two units in magnitude and points in a direction given by the angle q with respect to the +x axis.
Force is the agent of interactions of TWO OBJECTS
Forces are the agents of non-thermal interactions between two “objects.” (The quotes around the word “object” signify that it is being used in a general way that includes matter in the form of gases or liquids as well as matter in the solid phase. Sometimes it might even be a single atom or electron. We will omit the quotes from now on, but remember we are using the word object in this more general sense.) Just as there can’t be an interaction involving only one object, there can’t be a force involving only one object.
We normally say, “the force of the (name of an object) on the (name of another object)” to make clear which two objects are involved in the interaction and with the force. For example, we could say, “the force of the bat on the ball” or “the force of the person’s hand on the book.” We write this in symbols as:
\[F_{\text{bat on ball}}\]
and
\[ F_{\text{hand on book}}\]
or in symbolic notation,
\[F_{\text{A on B}} \]
This last notation means object A exerts a force on object B.
To realize that this is something you already know and actually does make sense to you think of the following: Use the word “push” in a sentence that refers to you actually pushing. What did you have to say? Did you name an object that you pushed on? Who did the pushing? Can you push without pushing on something? Remember that sometimes it might be something pretty squishy, such as air (which is still a “something,” still an object). Can an object be pushed unless there is “a something” pushing on it? This is what we mean when we say that force is the agent of an interaction. There simply cannot be an interaction without there being two objects. And there can’t be a force without there being two objects.
The Two Forces Involved in an Interaction are Opposite and Equal
Now we come to an idea about forces that makes perfectly good sense if we think about force as the agent of the interaction. But, it is easy to get our head all messed up if we forget this very basic idea and instead think of force as the result of the force instead of simply as the agent of the interaction. Fortunately, we don’t have to worry much about this until we get to the models in Part 2 of the course.
Here is the idea, which does make sense, if we focus on force as described above. The magnitude of \(F_{\text{A on B}}\) is the same as the magnitude of \(F_{\text{B on A}}\). The two forces have the same magnitude, but they point in opposite directions. This important property of forces has been given the label “Newton’s Third Law” and is written symbolically as
\[ F_{\text{A on B}} = – F_{\text{B on A}} \]
which simply says that object A pushes as hard on object B as object B pushes on object A, but in the opposite direction. There is one interaction, and the agent of that interaction, the force, has got to be the same in both directions.
Then How is Shopping Even Possible?
It's being claimed here that any time you push something, it pushes you back just as hard. It should follow clearly that when pushing on a cart, the cart pushes back on you with equal force. But if you push the cart forward, and the cart pushes you back just as hard, how could it possibly be that the cart moves forward, and you also continue to walk forward as well? Should the pair of you and the cart be stuck in place, as the forces always cancel out? This seems to suggest that the force the cart exerts on you is somehow less than what you exert on the cart.
Solution
The force the cart exerts back on you really is, in fact, equal to the force you exert on the cart. The reason you are able to shop is because there is a floor, which you are also interacting with. When the cart pushes you back, the friction with the floor pushes you forwards. Were you in space, there would nothing to push off of, and moving with your cart really would be impossible. The lesson here is to keep all the forces in mind, and to thank friction!
Some forces act only when objects are in contact
Let’s consider further the example of the force of the bat on the ball. Does the force of the bat continue to act on the ball after the ball is no longer touching the bat, or does the force act only while the ball and bat are in contact? Recall that force is the agent of interaction, so another way to ask the question is whether the ball and bat continue to interact after they are no longer in contact. The answer is they interact only while in contact. Thus, the force the bat exerts on the ball (and the force that the ball exerts on the bat) acts only while the two objects are in contact. Consequently, we call this force a contact force.
Some forces act even when the objects are not touching. Some act even when extreme distances separate the objects and these are referred to as long-range forces. Think about the force of gravity. The Earth pulls down on all objects near its surface. Note that we have two objects: the Earth and the object being pulled down. We know from everyday experience that the gravitational force of the Earth on an object is present whether the object is touching the Earth or not. Apparently the interaction between the Earth and a nearby object is unlike the force between the bat and the ball. The gravitational force is long range. The interaction and the force, the agent of the interaction, continue to exist even when there is no direct contact.
The force of gravity between our sun and each the planets in our solar system does indeed get weaker as the distance between the sun and the particular planet increases, but it is definitely still there. The gravitational force is truly long range. There are also non-contact forces that act between objects that are not touching, but “die off” or “go to zero” as soon as the objects get more than a little distance apart. Most of the forces that hold atoms together into molecules and hold the particles of solids and liquids together are like this. The interaction and the agent of the interaction, the force, exists, even though the particles are not touching, but the force decreases to zero in magnitude pretty fast as the particles begin to separate just a little bit from each other. We will see examples of this behavior in Chapter 3 when we study the forces between particles. Sometimes this kind of force is said to be short range.
Balanced and Unbalanced Forces
There is one last idea that we will need to use, but is also part of our common experience with pushes and pulls. We can easily imagine two people pushing on a table from opposite sides. If person A pushes harder than person B, the table moves. If the two people push the same, that is, they each exert the same force on the table, but in opposite directions, the table does not move. In the first case, we say the forces exerted by the two objects (the two persons) on the table (a third object) were not balanced, and as a result, the table moved. In the second case, the two objects exerted balanced forces on the table (the third object) and the table did not move. We say the forces exerted by the two persons were balanced.
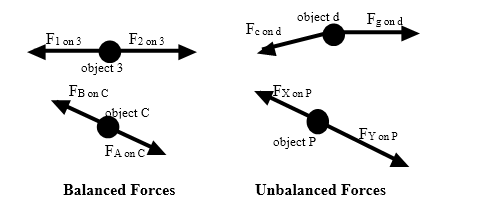
Can you give two reasons why the forces acting on object “3” and on object “C” are balanced and give the two different reasons why the forces acting on objects “P” and “d” are not balanced?
The reason the idea of balanced forces is useful is that sometimes we know the force F1 on 3 for example, but we need to know the force F2 on 3 in order to know the work that object 2 does on object 3. If there is reason to believe that the forces from object 1 on 3 and object 2 on 3 are balanced, then we can carry out the analysis and calculate what we want to know. This will become clear in discussion/lab when we start working with forces, springs, pulls, and pushes.