
12.3: Rotating Reference Frame





( \newcommand{\kernel}{\mathrm{null}\,}\)
Consider a rotating frame of reference which will be designated as the double-primed (rotating) frame to differentiate it from the non-rotating primed (moving) frame, since both of which may be undergoing translational acceleration relative to the inertial fixed unprimed frame as described in Figure 12.2.1.
Spatial time derivatives in a rotating, non-translating, reference frame
For simplicity assume that Rfix=Vfix=0, that is, the primed reference frame is stationary and identical to the fixed stationary unprimed frame. The double-primed (rotating) frame is a non-inertial frame rotating with respect to the origin of the fixed primed frame.
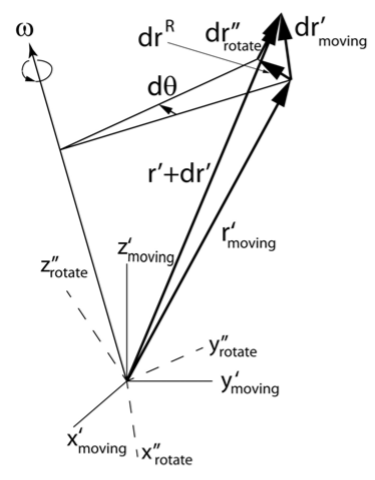
Appendix 19.4.2C shows that an infinitessimal rotation dθ about an instantaneous axis of rotation leads to an infinitessimal displacement drR where
drR=dθ×r′mov
Consider that during a time dt, the position vector in the fixed primed reference frame moves by an arbitrary infinitessimal distance dr′mov. As illustrated in Figure 12.3.1, this infinitessimal distance in the primed non-rotating frame can be split into two parts:
- drR=dθ×r′mov which is due to rotation of the rotating frame with respect to the translating primed frame.
- (dr′′rot) which is the motion with respect to the rotating (double-primed) frame.
That is, the motion has been arbitrarily divided into a part that is due to the rotation of the double-primed frame, plus the vector displacement measured in this rotating (double-primed) frame. It is always possible to make such a decomposition of the displacement as long as the vector sum can be written as
dr′mov=dr′′rot+dθ×r′mov
Since dθ=ωdt then the time differential of the displacement, Equation ???, can be written as
(dr′dt)mov=(dr′′dt)rot+ω×r′mov
The important conclusion is that a velocity measured in a non-rotating reference frame (dr′dt)mov can be expressed as the sum of the velocity (dr′′dt)rot, measured relative to a rotating frame, plus the term ω×r′mov which accounts for the rotation of the frame. The division of the dr′rot vector into two parts, a part due to rotation of the frame plus a part with respect to the rotating frame, is valid for any vector as shown below.
General vector in a rotating, non-translating, reference frame
Consider an arbitrary vector G which can be expressed in terms of components along the three unit vector basis ˆefixi in the fixed inertial frame as
G=3∑i=1Gfixiˆefixi
Neglecting translational motion, then it can be expressed in terms of the three unit vectors in the non-inertial rotating frame unit vector basis ˆeroti as
G=3∑i=1(Gi)rotˆeroti
Since the unit basis vectors ˆeroti are constant in the rotating frame, that is,
(dˆerotidt)rot=0
then the time derivatives of G in the rotating coordinate system ˆeroti can be written as
(dGdt)rot=3∑i−1(dGidt)rotˆeroti
The inertial-frame time derivative taken with components along the rotating coordinate basis ˆeroti, Equation ???, is
(dGdt)fix=3∑i−1(dGidt)rotˆeroti+(Gi)rotdˆerotidt
Substitute the unit vector ˆerot for r′mov in Equation ???, plus using Equation ???, gives that
(dˆerotdt)fix=ω׈erot
Substitute this into the second term of Equation ??? gives
(dGdt)fix=(dGdt)rot+ω×G
This important identity relates the time derivatives of any vector expressed in both the inertial frame and the rotating non-inertial frame bases. Note that the ω×G term originates from the fact that the unit basis vectors of the rotating reference frame are time dependent with respect to the non-rotating frame basis vectors as given by Equation ???. Equation ??? is used extensively for problems involving rotating frames. For example, for the special case where G=r′, then Equation ??? relates the velocity vectors in the fixed and rotating frames as given in Equation ???.
Another example is the vector ˙ω
˙ω=(dωdt)fix=(dωdt)rot+ω×ω=(dωdt)rot=˙ω
That is, the angular acceleration ˙ω has the same value in both the fixed and rotating frames of reference.