
12.2: Translational acceleration of a reference frame




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
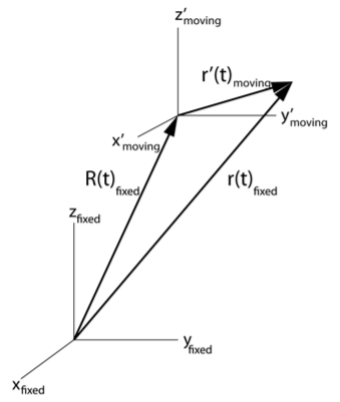
Consider an inertial system (xfix,yfix,zfix) which is fixed in space, and a non-inertial system (x′mov,y′mov,z′mov) that is moving in a direction relative to the fixed frame such as to maintain constant orientations of the axes relative to the fixed frame, as illustrated in Figure 12.2.1. The fixed frame is designated to be the unprimed frame and, to avoid confusion the subscript fix is attached to the fixed coordinates taken with respect to the fixed coordinate frame. Similarly, the translating reference frame, which is undergoing translational acceleration, has the subscript mov attached to the coordinates taken with respect to the translating frame of reference. Newton’s Laws of motion are obeyed only in the inertial (unprimed) reference frame. The respective position vectors are related by
rfix=Rfix+r′mov
where rfix is the vector relative to the fixed frame, r′mov is the vector relative to the translationally accelerating frame and Rfix is the vector from the origin of the fixed frame to the origin of the accelerating frame. Differentiating Equation ??? gives the velocity vector relation
vfix=Vfix+v′mov
where vfix=drfixdt, v′mov=dr′movdt and Vfix=dRfixdt. Similarly the acceleration vector relation is
afix=Afix+a′mov
where afix=d2rfixdt2, a′mov=d2r′movdt2 and Afix=d2Rfixdt2.
In the fixed frame, Newton’s laws give that
Ffix=mafix
The force in the fixed frame can be separated into two terms, the acceleration of the accelerating frame of reference Afix plus the acceleration with respect to the accelerating frame a′mov.
Ffix=mAfix+ma′mov
Relative to the accelerating reference frame the acceleration is given by
ma′mov=Ffix−mAfix
The accelerating frame of reference can exploit Newton’s Laws of motion using an effective translational force F′tran≡Ffix−mAfix. The additional −mAfix term is called an inertial force; it can be altered by choosing a different non-inertial frame of reference, that is, it is dependent on the frame of reference in which the observer is situated.