
12.11: Free Motion on the Earth




- Last updated
- Jan 22, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
The calculation of trajectories for objects as they move near the surface of the earth is frequently required for many applications. Such calculations require inclusion of the noninertial Coriolis force.
In the frame of reference fixed to the earth’s surface, assuming that air resistance and other forces can be neglected, then the acceleration equals
a′=geff−2ω×v′
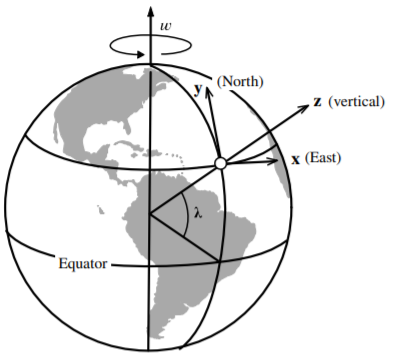
Neglect the centrifugal correction term since it is very small, that is, let geff=g. Using the coordinate axis shown in Figure 12.11.1, the surface-frame vectors have components
ω=0^i′+ωcosλ^j′+ωsinλ^k′
and
geff=−g^k′
Thus the Coriolis term is
2ω×v′=2|^i′^j′^k′0ωcosλωsinλ˙x′˙y′˙z′|=2[(ω˙z′cosλ−ω˙y′sinλ)^i′+(ω˙x′sinλ)^j′−(ω˙x′cosλ)^k′]
Therefore the equations of motion are
m¨r′=−mg^k′−2m[^i′(˙z′ωcosλ−˙y′ωsinλ)+^j′˙x′ωsinλ−^k′˙x′ωcosλ]
That is, the components of this equation of motion are
¨x′=−2ω(˙z′cosλ−˙y′sinλ)¨y′=−2ω˙x′sinλ¨z′=−g+2ω˙x′cosλ
Integrating these differential equations gives
˙x′=−2ω(z′cosλ−y′sinλ)+˙x′0˙y′=−2ωx′sinλ+˙y′0˙z′=−gt+2ωx′cosλ+˙z′0
where ˙x′0,˙y′0,˙z′0 are the initial velocities. Substituting the above velocity relations into the equation of motion for ¨x gives
¨x′=2ωgtcosλ−2ω(˙z′0cosλ−˙y′0sinλ)−4ω2x′
The last term 4ω2x is small and can be neglected leading to a simple uncoupled second-order differential equation in x. Integrating this twice assuming that x′0=y′0=z′0=0, plus the fact that 2ωgtcosλ and 2ω(˙z′0cosλ−˙y′0sinλ) are constant, gives
x′=13ωgt3cosλ−ωt2(˙z′0cosλ−˙y′0sinλ)+˙x′0t
Similarly,
y′=(˙y′0t−ω˙x′0t2sinλ)z′=−12gt2+˙z′0t+ω˙x′0t2cosλ
Consider the following special cases;
Example 12.11.1: Free fall from rest
Assume that an object falls a height h starting from rest at t=0, x=0, y=0, z=h. Then
x′=13ωgt3cosλ
y′=0
z′=h−12gt2
Substituting for t gives
x′=13ωcosλ√8h3g
Thus the object drifts eastward as a consequence of the earth’s rotation. Note that relative to the fixed frame it is obvious that the angular velocity of the body must increase as it falls to compensate for the reduced distance from the axis of rotation in order to ensure that the angular momentum is conserved.
Example 12.11.2: Projectile fired vertically upwards
An upward fired projectile with initial velocities ˙x′0=˙y′0=0 and ˙z′0=v0 leads to the relations
x′=13ωgt3cosλ−ωt2v0cosλ
y′=0
z′=−12gt2+v0t
Solving for t when z′=0 gives t=0, and t=2v0g. Also since the maximum height h that the projectile reaches is related by
v0=√2gh
then the final deflection is
x′=−43ωcosλ√8h3g
Thus the body drifts westwards.
Example 12.11.3: Motion parallel to Earth's surface
For motion in the horizontal x′−y′ plane the deflection is always to the right in the northern hemisphere of the Earth since the vertical component of ω is upwards and thus −2→ω×→v′ points to the right. In the southern hemisphere the vertical component of ω is downward and thus −2→ω×→v′ points to the left. This is also shown using the above relations for the case of a projectile fired upwards in an easterly direction with components ˙x′0,0,˙z′0. The resultant displacements are
x′=13ωgt3cosλ−ωt2˙z′0cosλ+˙x′0t
Similarly,
y′=−ω˙x′0t2sinλ
z′=−12gt2+˙z′0t+ω˙x′0t2cosλ
The trajectory is non-planar and, in the northern hemisphere, the projectile drifts to the right, that is southerly.
In the battle of the River de la Plata, during World War 2, the gunners on the British light cruisers Exeter, Ajax and Achilles found that their accurately aimed salvos against the German pocket battleship Graf Spee were falling 100 yards to the left. The designers of the gun sighting mechanisms had corrected for the Coriolis effect assuming the ships would fight at latitudes near 50∘ north, not 50∘ south.