6.2: General Planar Motion in Polar Coordinates




- Last updated
- Dec 30, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Although in principle all planar motion can be described in Cartesian coordinates, they are not always the easiest choice. Take, for example, a central force field (a force field whose magnitude only depends on the distance to the origin, and points in the radial direction), as we’ll study in the next section. For such a force field polar coordinates are a more natural choice than Cartesians. However, polar coordinates do carry a few subtleties not present in the Cartesian system, because the direction of the axes depends on position. We will therefore first derive the relevant expressions for the position, velocity and acceleration vector, as well as the components of the force vector, in polar coordinates for the general case.
As we already know (see Appendix A.2), the position vector →r=xˆx+yˆy has a particularly simple expression in polar coordinates: r=rˆr, where r=√x2+y2. To find the velocity and acceleration vectors in polar coordinates, we take time derivatives of r. Note that because the orientation of the polar basis vectors depends on the position in space, the time derivative acts on both the distance to the origin r and the basis vector ˆr. Because the two polar basis vectors are each other’s derivatives with respect to θ (see Equation A.8), we find for their time derivatives:
dˆrdt=dˆrdθdθdt=˙θˆθdˆθdt=dˆθdθdθdt=−˙θˆr
For the velocity and acceleration vectors we then find:
v=drdt=˙rˆr+r˙θˆθa=dvdt=(¨r−r˙θ2)ˆr+(r¨θ+2˙r˙θ)ˆθ
Note that Equations 5.1.3 and 5.1.6 are the special cases of Equations 6.2.7 and 6.2.9 for which both the radius r and the angular velocity ω=˙θ are constant. Using Equation 6.2.9 for ¨r in Newton’s second law, we get an expression decomposing the net force F into a radial and an angular part, each of which consists of two terms:
F=m¨r=Frˆr+Fθˆθ
Fr=m(¨r−r˙θ2)
Fθ=m(r¨θ+2˙r˙θ)
The two terms in Fr are readily identified as the radial acceleration ¨r (acting along the line through the origin) and the centripetal force (which causes objects to rotate around the origin, see Equation 5.2.1). The first term r¨θ in Fθ is the tangential acceleration α of a rotating object whose angular velocity is changing (Equation 5.1.8). The last term in Fθ we have not encountered before; it is known as the Coriolis force
FCor=2m˙r˙θˆθ
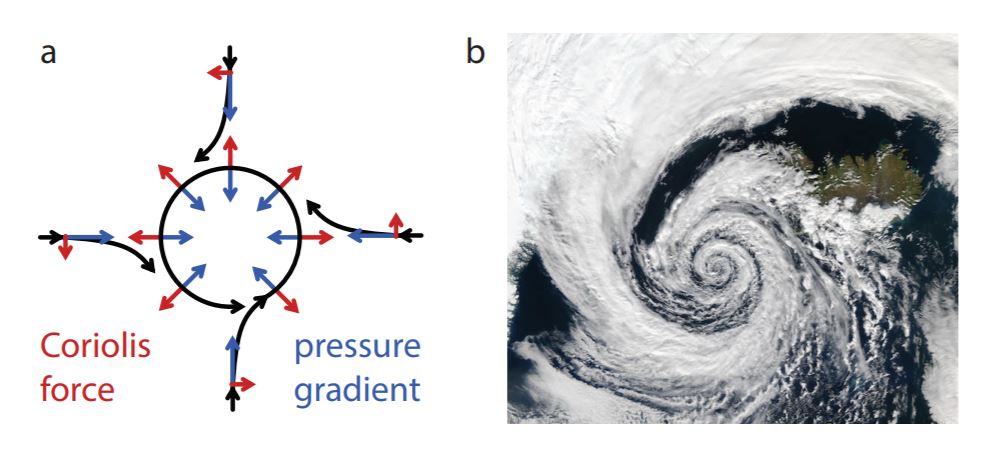
and is associated with a velocity in both the radial and the angular direction. It is fairly weak on everyday length scales, but gets large on global length scales. In particular, if you move over the surface of the Earth (necessarily with a nonzero angular component of your velocity), it tends to deflect you from a straight path. On the Northern hemisphere, if you move horizontally, it tends to push you to the right; it also pushes you west when going up, and east when going down. Coriolis forces are responsible for the rotational movement of air around high and low pressure zones, causing respectively clockwise and counterclockwise currents around them on the Northern hemisphere (Figure 6.2.1). We’ll encounter the Coriolis force again in the more general three-dimensional setting in Section 7.2.