
11.11: The Three-Body Problem




- Last updated
- Mar 14, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Two bodies interacting via conservative central forces can be solved analytically for the inverse square law and the Hooke’s law radial dependences as already discussed. Central forces that have other radial dependences for the equations of motion may not be expressible in terms of simple functions, nevertheless the motion always can be given in terms of an integral. For a gravitational system comprising n\geq 3 bodies that are interacting via the two-body central gravitational force, then the equations of motion can be written as
m_{j}\mathbf{ \ddot{q}=G}\sum_{\substack{ k \\ k\neq j}}^{n}m_{j}m_{k}\frac{\left( \mathbf{q}_{k}-\mathbf{q}_{j}\right) }{\left\vert \mathbf{q}_{k}-\mathbf{q} _{j}\right\vert ^{3}} \tag{$j=1,2,..,n$}
Even when all the n bodies are interacting via two-body central forces, the problem usually is insoluble in terms of known analytic integrals. Newton first posed the difficulty of the three-body Kepler problem which has been studied extensively by mathematicians and physicists. No known general analytic integral solution has been found. Each body for the n-body system has 6 degrees of freedom, that is, 3 for position and 3 for momentum. The center-of-mass motion can be factored out, therefore the center-of-mass system for the n-body system has 6n-10 degrees of freedom after subtraction of 3 degrees for location of the center of mass, 3 for the linear momentum of the center of mass, 3 for rotation of the center of mass, and 1 for the total energy of the system. Thus for n=2 there are 12-10=2 degrees of freedom for the two-body system for which the Kepler approach takes to be \mathbf{r} and \theta . For n=3 there are 8 degrees of freedom in the center of mass system that have to be determined.
Numerical solutions to the three-body problem can be obtained using successive approximation or perturbation methods in computer calculations. The problem can be simplified by restricting the motion to either of following two approximations:
1) Planar approximation
This approximation assumes that the three masses move in the same plane, that is, the number of degrees of freedom are reduced from 8 to 6 which simplifies the numerical solution.
2) Restricted three-body approximation
The restricted three-body approximation assumes that two of the masses are large and bound while the third mass is negligible such that the perturbation of the motion of the larger two by the third body is negligible. This approximation essentially reduces the system to a two body problem in order to calculate the gravitational fields that act on the third much lighter mass.
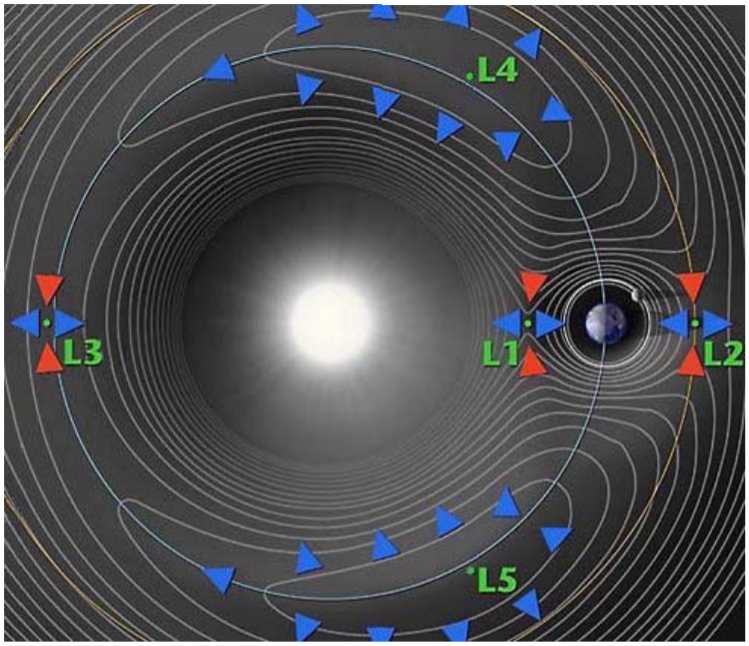
Euler and Lagrange showed that the restricted three-body system has five points at which the combined gravitational attraction plus centripetal force of the two large bodies cancel. These are called the Lagrange points and are used for parking satellites in stable orbits with respect to the Earth-Moon system, or with respect to the Sun-Earth system. Figure \PageIndex{1} illustrates the five Lagrange points for the Earth-Sun system. Only two of the Lagrange points, L_{4} and L_{5} lead to stable orbits. Note that these Lagrange points are fixed with respect to the Earth-Sun system which rotates with respect to inertial coordinate frames. The 1900’s discovery of the Trojan asteroids at the L_{4} and L_{5} Lagrange points of the Sun-Jupiter system confirmed the Lagrange predictions.
Poincaré showed that the motion of a light mass bound to two heavy bodies can exhibit extreme sensitivity to initial conditions as well as characteristics of chaos. Solution of the three-body problem has remained a largely unsolved problem since Newton identified the difficulties involved.