
11.4: The Uneven Dumbbell




- Last updated
- Nov 6, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
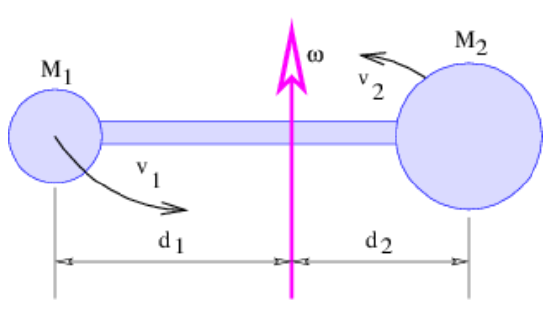
So far we have put no restrictions on the movements of the two particles. An interesting special case occurs when the particles are connected by a lightweight, rigid rod, giving us a dumbbell. In order to further simplify things, we assume that the rod is connected rigidly to a fixed axle at the center of mass of the two particles, as shown in figure 11.6. The masses constituting the ends of the dumbbell are therefore free to revolve in circles about the axle, but they are prevented from executing any other motion. The key effect of this constraint is that both masses rotate about the axle with the same angular frequency ω.
If the particles are respectively distances d1 and d2 from the axle, then their speeds are v1=d1ω and v2=d2ω. Thus the kinetic energy of the rotating dumbbell is
Kintern =12M1v21+12M2v22=12Iω2 (fixed axle)
where I=M1d21+M2d22 is called the moment of inertia. Similarly, the magnitude of the spin angular momentum, which is a vector parallel to the axle, is
Lspin=M1d1v1+M2d2v2=Iω (fixed axle)
Finally, Newton’s second law for rotation becomes
τ=dLspindt=dIωdt=Idωdt( fixed axle )
where τ is the component of torque along the rotation axis.
Note that the rightmost expression in equation (???) assumes that I is constant, which only is true if d1 and d2 are constant – i. e., the dumbbell must truly be rigid.